Power_Broker
Active member
Random update: I'm thinking about taking the on-board LiDAR sensor and turning it into a scanning LiDAR system as a sort of SLAM (Simultaneous Localization and Mapping) terrain mapping unit.
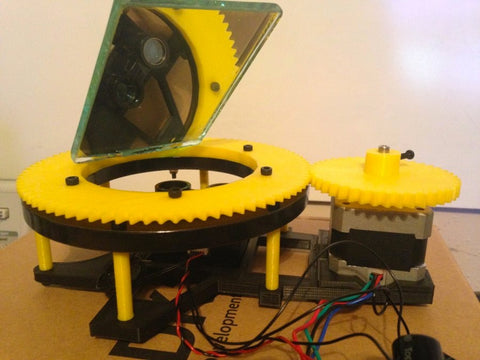
Basically the lidar sensor will be mounted in the fuselage pointing towards the nose of the plane instead of directly at the ground (as it is now). Then I spin a tilted mirror with a small DC motor in front of the LiDAR sensor. I also want to stabilize the entire unit with the on-board IMU and a couple of extra servos.
With the correct mirror angle, mirror rotation speed, and LiDAR sample speed, I'll be able to map the ground below the plane for around $200. If you were to buy a COTS unit that did this, you'd probably pay AT LEAST $450.
Still thinking about this feature and am not working on it yet, just wanted to let y'all know what's in the works "long term"
Basically the lidar sensor will be mounted in the fuselage pointing towards the nose of the plane instead of directly at the ground (as it is now). Then I spin a tilted mirror with a small DC motor in front of the LiDAR sensor. I also want to stabilize the entire unit with the on-board IMU and a couple of extra servos.
With the correct mirror angle, mirror rotation speed, and LiDAR sample speed, I'll be able to map the ground below the plane for around $200. If you were to buy a COTS unit that did this, you'd probably pay AT LEAST $450.
Still thinking about this feature and am not working on it yet, just wanted to let y'all know what's in the works "long term"