slembcke
Member
Hi all! First time actually posting here.
TL;DR It currently looks like this:

So a after a few years of flying helis and multirotors, I've gotten myself sucked into all things Flite Test. After building some of the basic designs like the Nutball, Delta and Bloody Wonder, I decided it was time to try something off the wall. I've seen tail sitting VTOLs before and thought that was pretty cool to have a plane that can land like a heli. I've also wanted to make something with differential thrust, and FT keeps featuring the X-Vert in their videos... so I figured I'd try to make something like that!
After looking through some numbers and some random guessing, I decided to go with dual 1306 3300kv EMAX red bottoms with 3x3x3 props. My first choice was going to be 1806s, but it seems like they are going out of style, and I didn't want to shop around forever. I used a Ready Made RC Seriously Dodo flight controller running iNav 1.7. The first version of the plane might best be described as "stuff poorly attached to an old warped piece of left over foam". I didin't really know what I was doing, so I made a 15x10" rectangle, with a 25% cg and 20% control surface.

I was mostly interesed in experimenting with how much control surface I would need to hover. While this rough crappy version never hovered, I was able to get it to fly pretty well, and it was _fast_. Since the foam I used for it was warped, it was really squirrely, and always tried to roll heavily to the right. It started delaminating near my crappy motor mounts, and I figured I was pushing my luck that it hadn't already disintegrated mid-flight. So I moved on to making a v2 with a little more thought into the design and construction.

I swept the wing a little to help move the cg forward, increased the control suface area and gave it a KF step airfoil. I mounted the motors out in front of the wing on a square poplar dowel to give them access to a nice smooth airstream. The first plane I had before building FT planes had a pusher prop and had a fair amount of trouble with wing turbulence hitting the prop. This time I used some leftover Elmers foam. Heavy stuff, but reasonably durable.

Well, it turns out that poplar dowel wasn't strong enough, and it broke pretty easily on the first battery after a couple rough landings. I was just starting to get a feel for how much control throw it needed too. With a little glue, it was back up in the air... then the ground... and then back on the bench. That clearly wasn't going to last, so I turned the motors around and put them inside the wing. Even though they were just held on by a couple dabs of hot glue, they were well protected by the wing and vertical stabilizers and didn't break again.

At this point I was pretty happy with how it flew. It was definitely less efficient than the first prototype, but I didn't really care about extreme flight time or efficiency anyway. iNav doesn't support VTOLs directly, so to experiment with hovering, I rotated the board setting and all of my motor/servor mixes to make it fly like a multi-rotor. After a bit of turning, I got it to hover quite nicely! (I should record a video...) It's not as stable as a quad, especially in the pitch direction so it's hard to fly well in acroo made. Angle mode is a breeze however. iNav's PIFF controller works perfecetly for this. Unfortunately hovering draws a lot of current, and my 35C 450 mah Gremlin batteries are not quite up to the challenge. Pulling 10-15 amps, they peter out in less than two minutes. The voltage drop at full throttle is at least 0.3 volts! Unfortunately there is no way to switch back and forth between forward flight mode and hover without pasting some commands into the iNav command line. Vertical takeoffs work fine in forward flight mode since it accelerates pretty quickly.
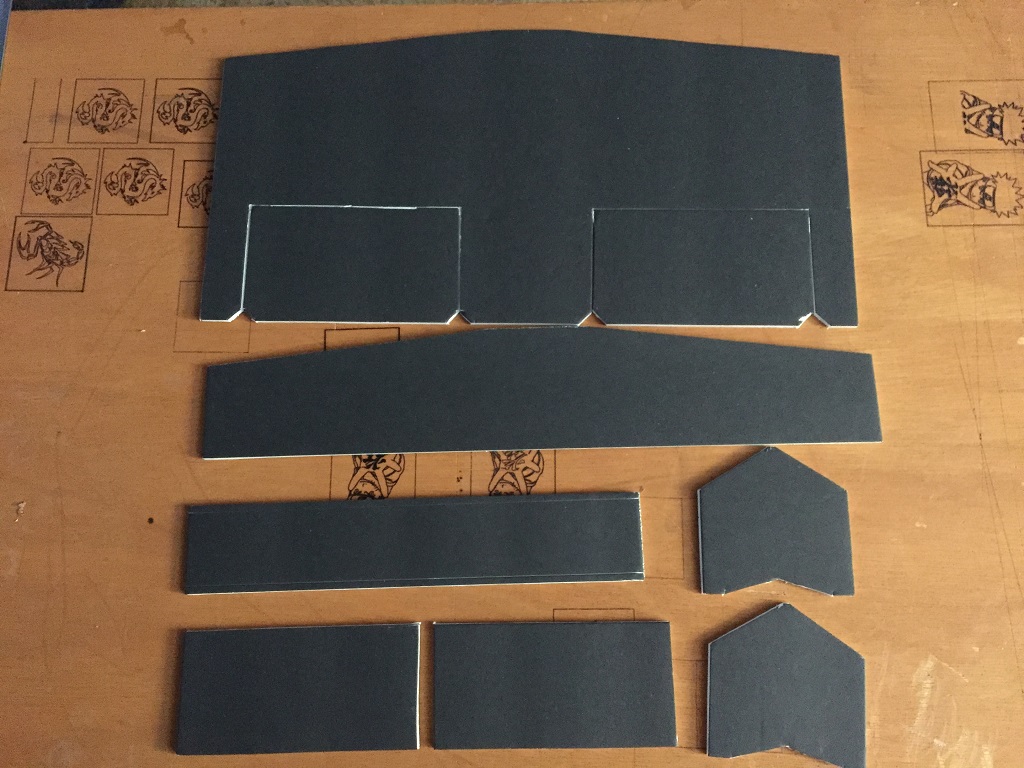
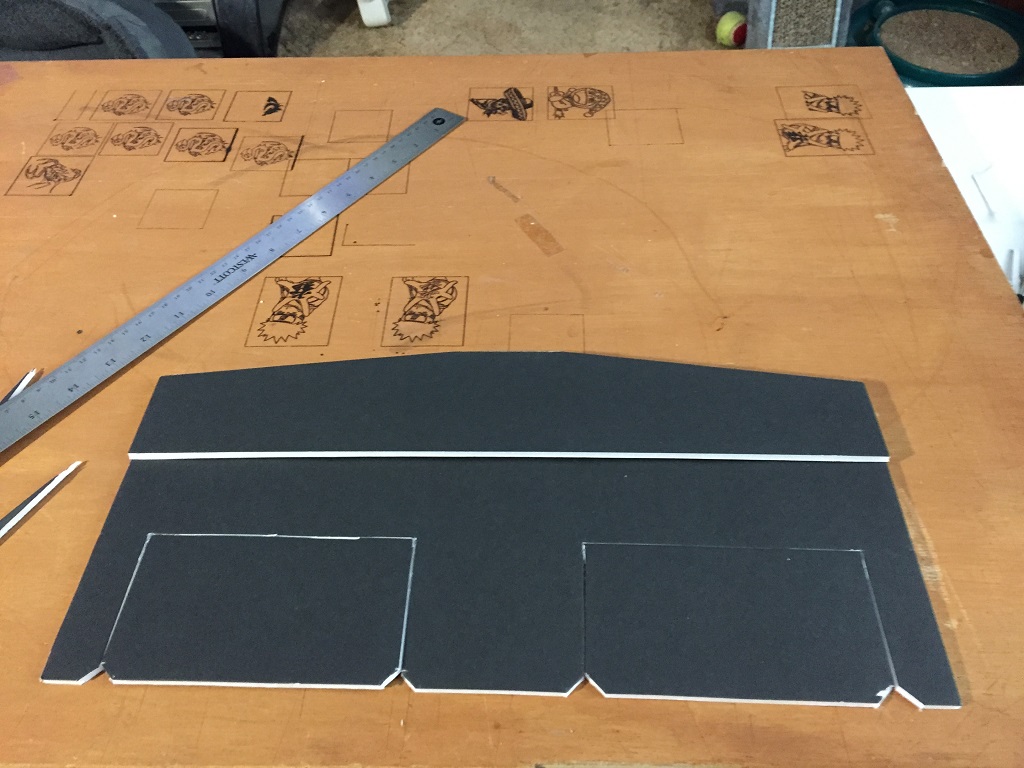
Over the weekend I made v3. The wing structure is better reinforced and made with FT foam so it's about 30 grams lighter. I made the wing a little deeper, and trimmed in the edges of the elevons to make it less twitchy in forward flight. I also made a cylindrical nose for it. The AUW is ~220 grams with a 450 battery now. The nose definitely helps it to fly more smoothly, but seems to increase the drag quite a bit. Maybe it will get better once I add panels to cover the back too.
I think my next step is to dig into the iNav code and see how hard it will be to make a mode switch to swap the profile settings so I can actually swap between the forward flight and hover settings. It could be a true VTOL at that point. Adding support for rotating the controls and self leveling would be icing on the cake.
Will post more as I make progress.
TL;DR It currently looks like this:

So a after a few years of flying helis and multirotors, I've gotten myself sucked into all things Flite Test. After building some of the basic designs like the Nutball, Delta and Bloody Wonder, I decided it was time to try something off the wall. I've seen tail sitting VTOLs before and thought that was pretty cool to have a plane that can land like a heli. I've also wanted to make something with differential thrust, and FT keeps featuring the X-Vert in their videos... so I figured I'd try to make something like that!
After looking through some numbers and some random guessing, I decided to go with dual 1306 3300kv EMAX red bottoms with 3x3x3 props. My first choice was going to be 1806s, but it seems like they are going out of style, and I didn't want to shop around forever. I used a Ready Made RC Seriously Dodo flight controller running iNav 1.7. The first version of the plane might best be described as "stuff poorly attached to an old warped piece of left over foam". I didin't really know what I was doing, so I made a 15x10" rectangle, with a 25% cg and 20% control surface.

I was mostly interesed in experimenting with how much control surface I would need to hover. While this rough crappy version never hovered, I was able to get it to fly pretty well, and it was _fast_. Since the foam I used for it was warped, it was really squirrely, and always tried to roll heavily to the right. It started delaminating near my crappy motor mounts, and I figured I was pushing my luck that it hadn't already disintegrated mid-flight. So I moved on to making a v2 with a little more thought into the design and construction.

I swept the wing a little to help move the cg forward, increased the control suface area and gave it a KF step airfoil. I mounted the motors out in front of the wing on a square poplar dowel to give them access to a nice smooth airstream. The first plane I had before building FT planes had a pusher prop and had a fair amount of trouble with wing turbulence hitting the prop. This time I used some leftover Elmers foam. Heavy stuff, but reasonably durable.

Well, it turns out that poplar dowel wasn't strong enough, and it broke pretty easily on the first battery after a couple rough landings. I was just starting to get a feel for how much control throw it needed too. With a little glue, it was back up in the air... then the ground... and then back on the bench. That clearly wasn't going to last, so I turned the motors around and put them inside the wing. Even though they were just held on by a couple dabs of hot glue, they were well protected by the wing and vertical stabilizers and didn't break again.

At this point I was pretty happy with how it flew. It was definitely less efficient than the first prototype, but I didn't really care about extreme flight time or efficiency anyway. iNav doesn't support VTOLs directly, so to experiment with hovering, I rotated the board setting and all of my motor/servor mixes to make it fly like a multi-rotor. After a bit of turning, I got it to hover quite nicely! (I should record a video...) It's not as stable as a quad, especially in the pitch direction so it's hard to fly well in acroo made. Angle mode is a breeze however. iNav's PIFF controller works perfecetly for this. Unfortunately hovering draws a lot of current, and my 35C 450 mah Gremlin batteries are not quite up to the challenge. Pulling 10-15 amps, they peter out in less than two minutes. The voltage drop at full throttle is at least 0.3 volts! Unfortunately there is no way to switch back and forth between forward flight mode and hover without pasting some commands into the iNav command line. Vertical takeoffs work fine in forward flight mode since it accelerates pretty quickly.
Over the weekend I made v3. The wing structure is better reinforced and made with FT foam so it's about 30 grams lighter. I made the wing a little deeper, and trimmed in the edges of the elevons to make it less twitchy in forward flight. I also made a cylindrical nose for it. The AUW is ~220 grams with a 450 battery now. The nose definitely helps it to fly more smoothly, but seems to increase the drag quite a bit. Maybe it will get better once I add panels to cover the back too.
I think my next step is to dig into the iNav code and see how hard it will be to make a mode switch to swap the profile settings so I can actually swap between the forward flight and hover settings. It could be a true VTOL at that point. Adding support for rotating the controls and self leveling would be icing on the cake.
Will post more as I make progress.
Last edited: