C0d3M0nk3y
Posted a thousand or more times
Twitch,
If you model a tilt mechanism to have 3D printed, send it my way. I will print a handful of test units for you.
Are you going to try David W.'s new design?

Twitch,
If you model a tilt mechanism to have 3D printed, send it my way. I will print a handful of test units for you.
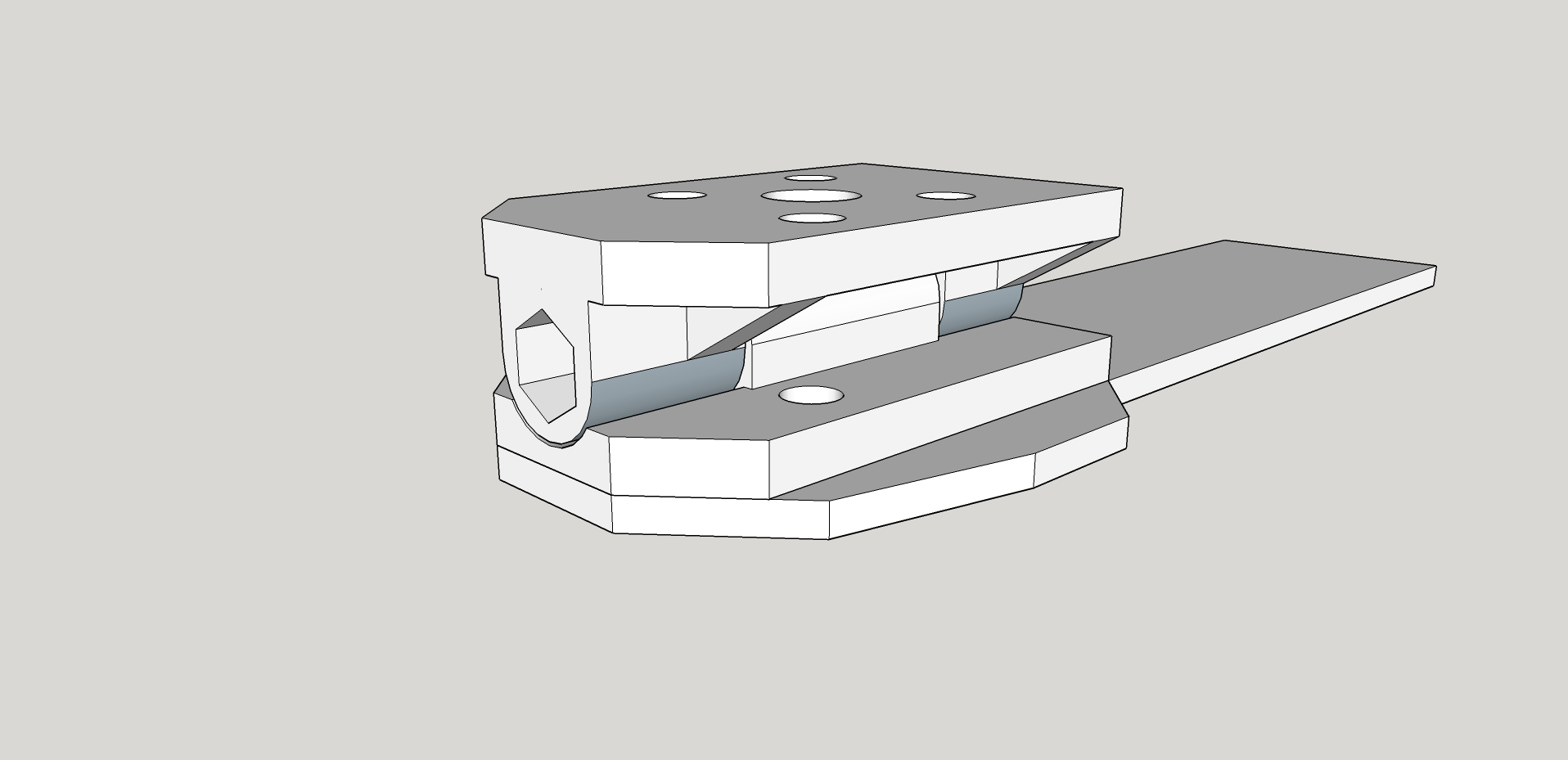
That tilt looks nice Mustang. Is this going to be 100% printed, or will it use a metal pin for the pivot? What kind of 3D printer do you have? That's another item on my list of toys I want to add to my collection, but I haven't really researched the printers that much.
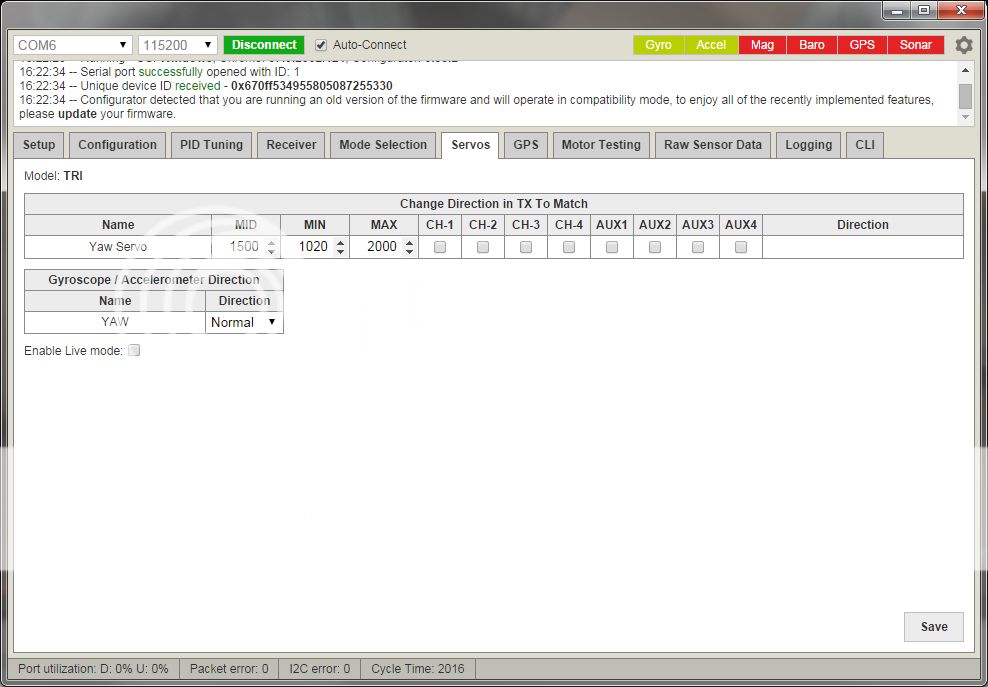
I think you want the rear motor tilted a little to the left if your rear prop is clockwise, or a little to the right if your rear prop is counter clockwise. I do this by adjusting the servo midpoint.I had the rear motor as vertical as I could get it when I attached the servo.
I'm running counter rotating props on the front.
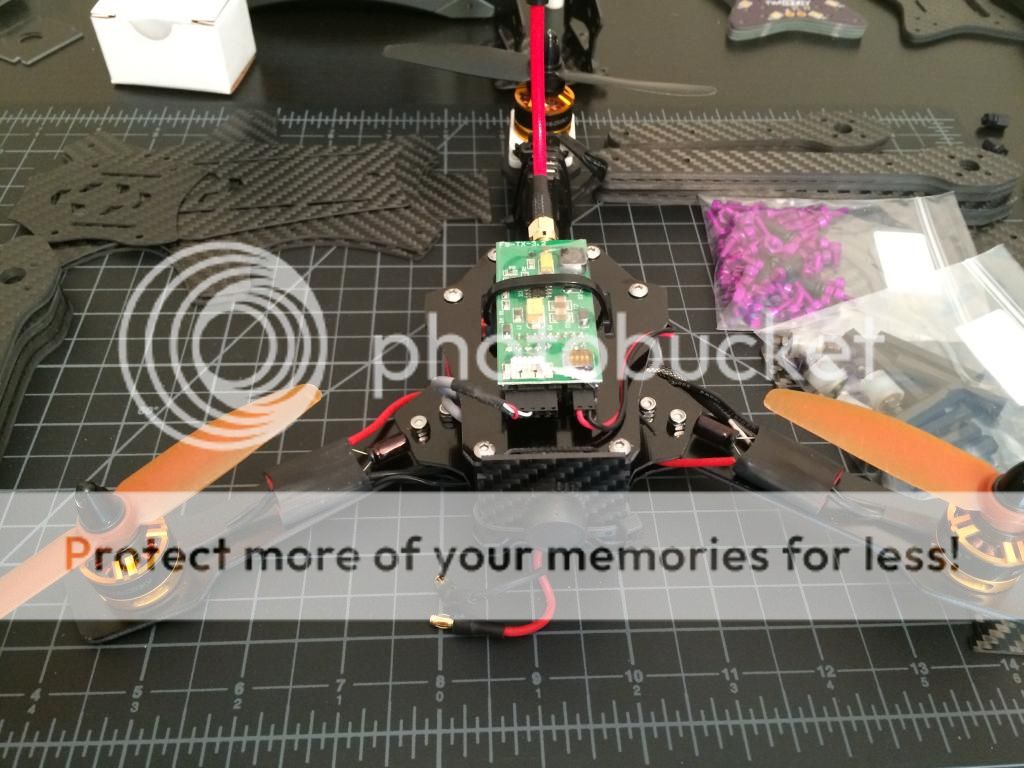
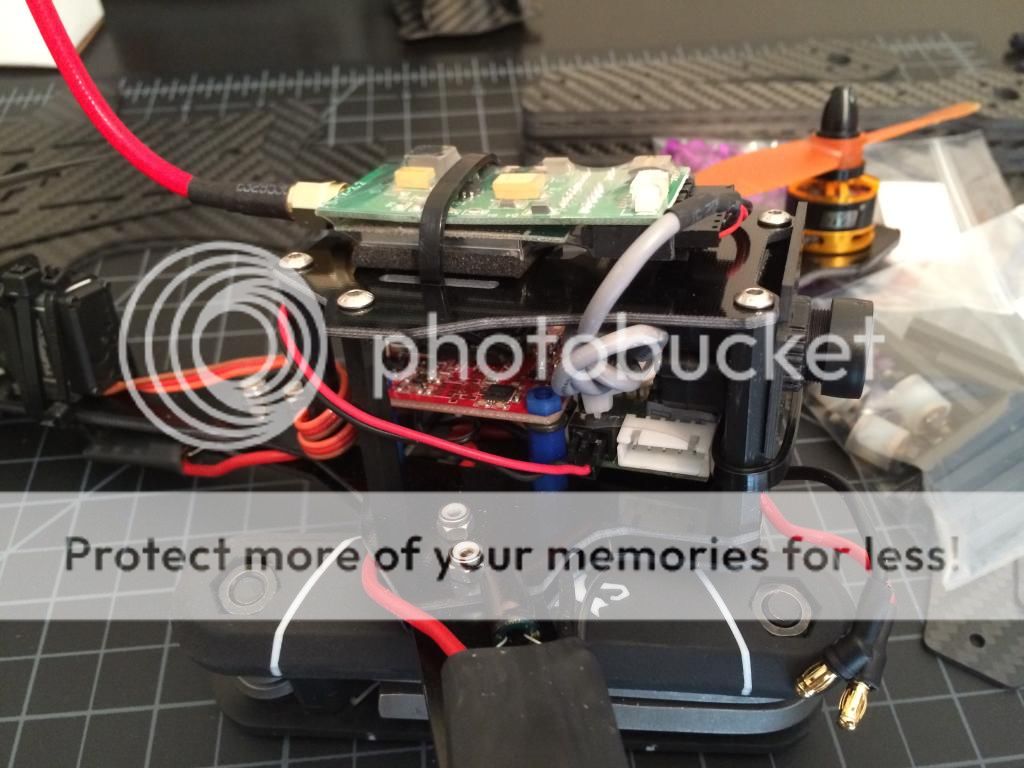
Specs:
DYS 1806 Motors
EMAX 12a ESC
Acro Naze32
1300mah 45-90C 3S battery
5030 propellers (for now until I get it flying right)
This is the exact same parts off of my FPV quad that I disassembled to build this tri, so I know all of the parts are in perfect working order.
I'll play around with the tail servo some more, but I had the rear motor as vertical as I could get it when I attached the servo. I had a larger tri with the KK2.1.5 board and it was extremely easy to setup properly (once I got my motor issue sorted out). I'm sure there's one little thing I'm overlooking for this tri that will solve all of my problems, I just can't think of it yet.
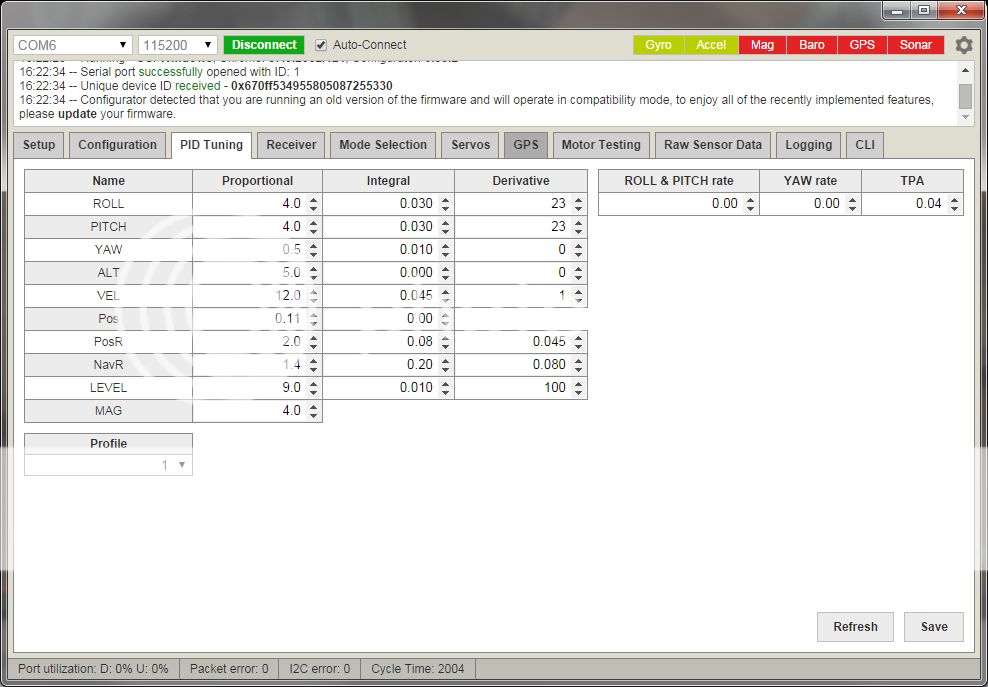
It's more like an in flight accelerometer calibration for auto level.I remember seeing something along the lines of in-flight leveling in the latest version of Baseflight; is this their version of auto-tune or something different? If it's auto-tune I would like to give it a try so any information about it would be great. I did a quick search but couldn't find anything about it.
 The arms came off of my Armattan clone quad, stole the tilt mechanism from my large tri (very first multirotor I built), and cut the frame from scrap G10. Take a look below at the CF version Since I don't have anymore 2204's (and my hobby budget is tapped since I had to buy a new soldering station this month), I cut the booms to have two 2mm holes to mount the DYS motors, and two 3mm holes for the 2204's. Once I upgrade the motors I can use a round file to enlarge the 2mm holes to 3mm so I won't need to cut a new set of booms. Do I just select the box and it's activated for auto level tuning, or is there more to it? And yes... my work space is a mess.
The arms came off of my Armattan clone quad, stole the tilt mechanism from my large tri (very first multirotor I built), and cut the frame from scrap G10. Take a look below at the CF version Since I don't have anymore 2204's (and my hobby budget is tapped since I had to buy a new soldering station this month), I cut the booms to have two 2mm holes to mount the DYS motors, and two 3mm holes for the 2204's. Once I upgrade the motors I can use a round file to enlarge the 2mm holes to 3mm so I won't need to cut a new set of booms. Do I just select the box and it's activated for auto level tuning, or is there more to it? And yes... my work space is a mess.