
Twitchity
Senior Member
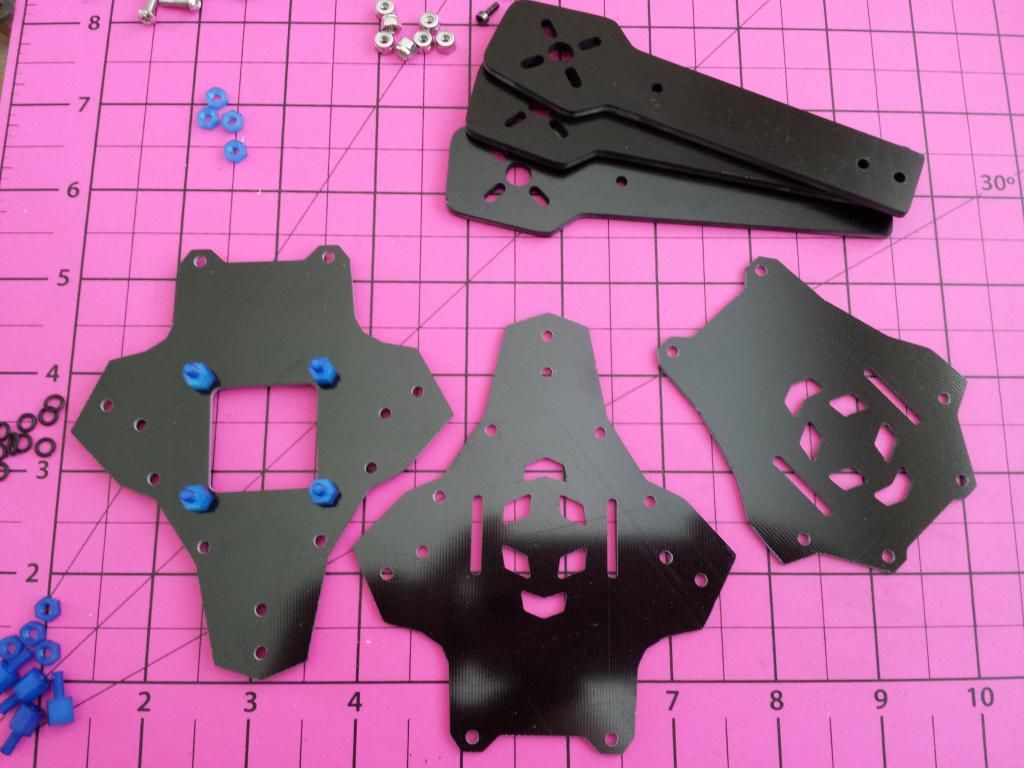
Seeing the talk about mini tricopters lately got me wanting to build my own, so I sat down one evening and came up with a test design for a mini tricopter. The criteria I wanted to build the tri to was FPV capable, and just large enough to fit 6" rotors.
Once I got the design made and cut out I noticed the top and bottom frame plates closely resembled a manta ray although I forgot to take into account the bit I was using to cut the material was exactly at the size for the camera mount cutouts so it my CNC skipped over those cuts. Not a big deal as I can just use double-sided tape/Velcro to mount my 600TVL camera on this test frame. The arms were taken off of my FPV quad so they aren't the ones that will be in the final design, I'm just out of 1/8" G10 at the moment (on the bright side, I'll be getting my CF order today).
although I forgot to take into account the bit I was using to cut the material was exactly at the size for the camera mount cutouts so it my CNC skipped over those cuts. Not a big deal as I can just use double-sided tape/Velcro to mount my 600TVL camera on this test frame. The arms were taken off of my FPV quad so they aren't the ones that will be in the final design, I'm just out of 1/8" G10 at the moment (on the bright side, I'll be getting my CF order today).
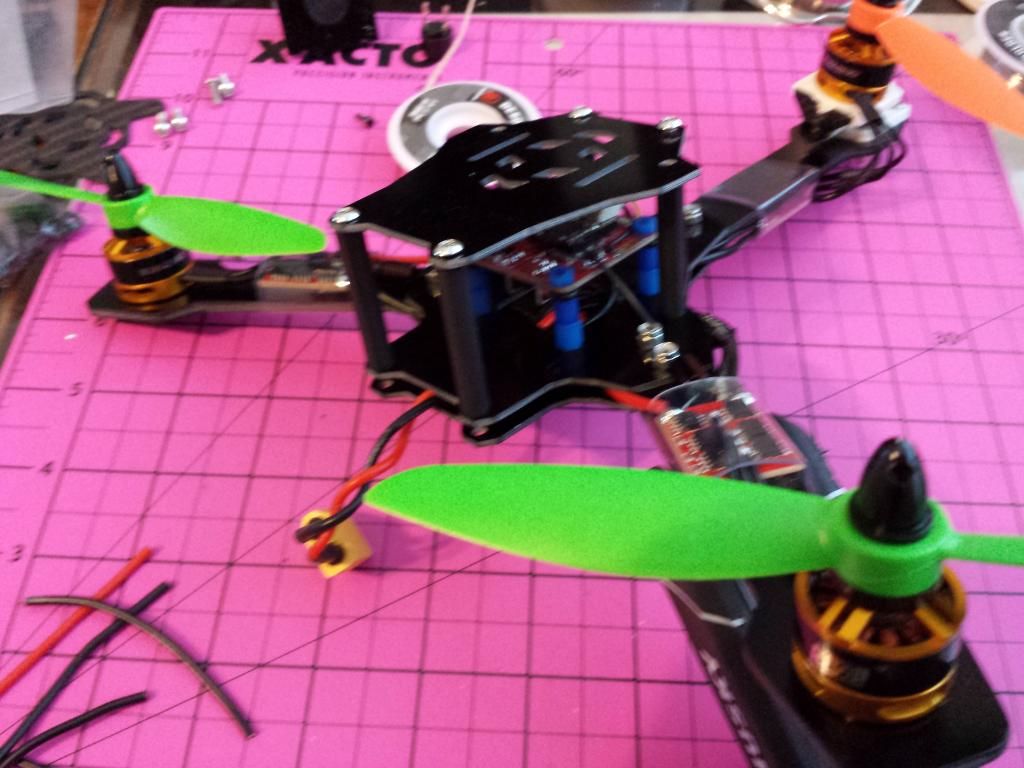
And assembled

I'm still not sure how I want to mount the tail motor tilt mechanism, or even what kind I want to use, but for now I'm using the landing gear style tilt mechanism since I had the parts for this laying around. Here's the beginning or the wiring and the arms temporarily attached to the tri. Electronics were also stolen from my FPV quad.

Just need to mount the tail servo, connect wires to the Naze, and program the Naze for a tricopter and I SHOULD be good for a maiden flight.

I looked some last night, but wasn't finding much information on programming the Naze32 for a tricopter. I followed the connections from Abusemark where the servo plugs into S1 (old M1) and motors plug into M3, M4, M5 for servo mode.
I also did not follow the rotor rotation from the manual where it shows all motors spinning in a CCW rotation. FL motor spins CW, FR spins CCW, Rear spins CW. If this will cause an issue, someone please let me know
Once I got the design made and cut out I noticed the top and bottom frame plates closely resembled a manta ray
although I forgot to take into account the bit I was using to cut the material was exactly at the size for the camera mount cutouts so it my CNC skipped over those cuts. Not a big deal as I can just use double-sided tape/Velcro to mount my 600TVL camera on this test frame. The arms were taken off of my FPV quad so they aren't the ones that will be in the final design, I'm just out of 1/8" G10 at the moment (on the bright side, I'll be getting my CF order today).
And assembled
I'm still not sure how I want to mount the tail motor tilt mechanism, or even what kind I want to use, but for now I'm using the landing gear style tilt mechanism since I had the parts for this laying around. Here's the beginning or the wiring and the arms temporarily attached to the tri. Electronics were also stolen from my FPV quad.
Just need to mount the tail servo, connect wires to the Naze, and program the Naze for a tricopter and I SHOULD be good for a maiden flight.
I looked some last night, but wasn't finding much information on programming the Naze32 for a tricopter. I followed the connections from Abusemark where the servo plugs into S1 (old M1) and motors plug into M3, M4, M5 for servo mode.
I also did not follow the rotor rotation from the manual where it shows all motors spinning in a CCW rotation. FL motor spins CW, FR spins CCW, Rear spins CW. If this will cause an issue, someone please let me know




