Earlier this year I got an Aeroquad Typhoon kit, put it together, and flew it around for bit. This isn't about that kit.
While trying to learn to fly the Typhoon, I poked around online and came across David's tricopter design, and FliteTest. I liked the design and ordered parts to build it. Good thing, too; accumulated crash damage and straightening of the aluminum arms led to metal fatigue and cracks. It's not flyable again unless I get some replacement arms.
Building the tri went quick; I got the frame ready last week, and after (most of) the electronics arrived Friday I started on the wiring. I finished it up Sunday and got in some low flying in the back yard.

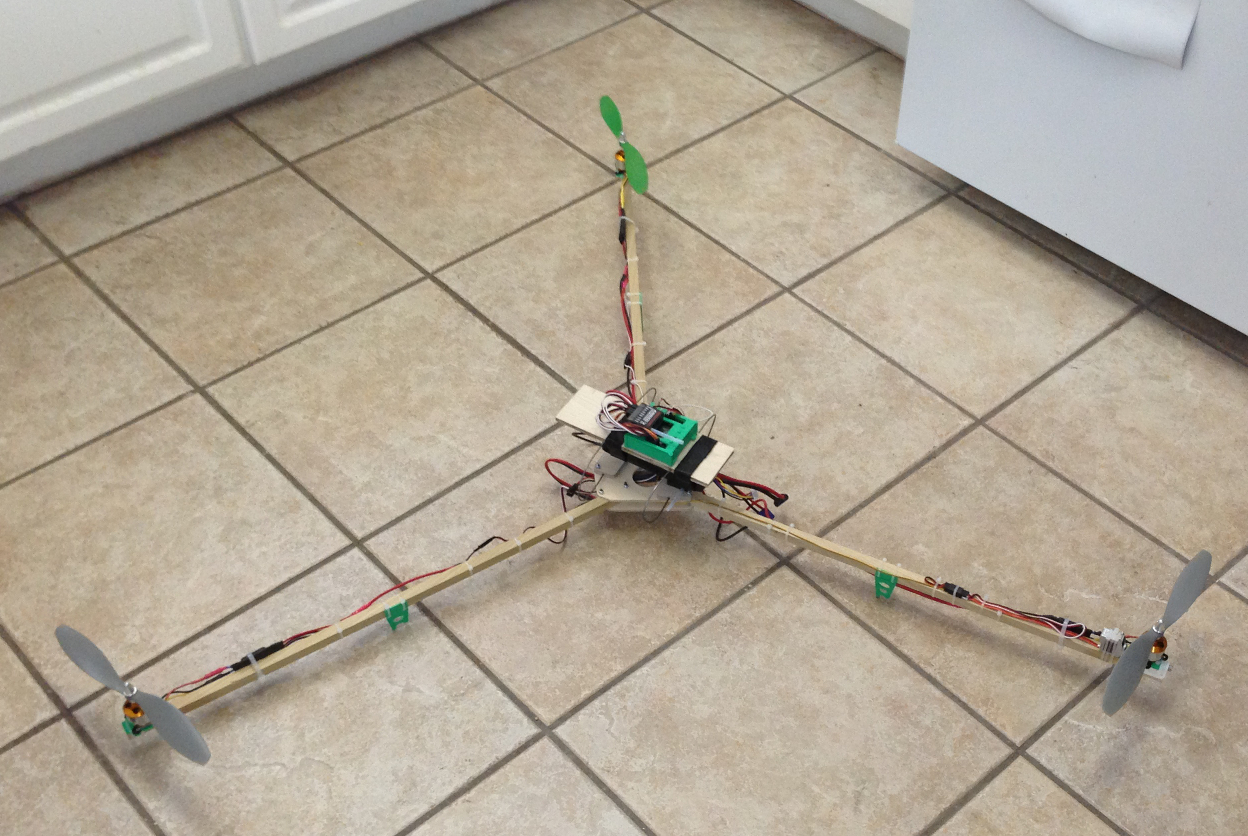
Given the description of longer-armed tricopters as "slushy" and "slow", it sounded like an excellent way for a learning pilot to learn how to fly rather than crash.") I used 24" arms, putting the motors way out there. It flies, but it's rough. I think the culprit is one of the motors, with a bent shaft. New motors are on order, but were out of stock. I'll put them on when I can.
I used 24" arms, putting the motors way out there. It flies, but it's rough. I think the culprit is one of the motors, with a bent shaft. New motors are on order, but were out of stock. I'll put them on when I can.
There's one major thing I changed. I figure, if the camera tray noticeably smooths the vibrations out for a camera, it can do the same for the flight controller. So I inverted it, putting the tray above the frame. The battery hangs underneath, and the controller sits on top. We'll see if it works out once I get new motors on.

While trying to learn to fly the Typhoon, I poked around online and came across David's tricopter design, and FliteTest. I liked the design and ordered parts to build it. Good thing, too; accumulated crash damage and straightening of the aluminum arms led to metal fatigue and cracks. It's not flyable again unless I get some replacement arms.
Building the tri went quick; I got the frame ready last week, and after (most of) the electronics arrived Friday I started on the wiring. I finished it up Sunday and got in some low flying in the back yard.

Given the description of longer-armed tricopters as "slushy" and "slow", it sounded like an excellent way for a learning pilot to learn how to fly rather than crash.
I used 24" arms, putting the motors way out there. It flies, but it's rough. I think the culprit is one of the motors, with a bent shaft. New motors are on order, but were out of stock. I'll put them on when I can.There's one major thing I changed. I figure, if the camera tray noticeably smooths the vibrations out for a camera, it can do the same for the flight controller. So I inverted it, putting the tray above the frame. The battery hangs underneath, and the controller sits on top. We'll see if it works out once I get new motors on.