I'm very new and green to this FPV world. I come from the DJI world where (for 90% of the settings) everything is done for you and all you have to do is take the quad out of the box, update any firmware and go out and fly.
I'm just starting to get into this new FPV venture, and so far it has been quite the challenge and a steep learning cure. I don't mind a challenge and thrive on learning new technology, but when there is no base to start from, it can be very frustrating and disheartening! In any event, here is my situation and hope someone can steer me in the right direction:
After reading a number of forums and watching numerous YouTubes, I decided to purchase the iFlight Cineebe 4K (Frsky mini xm+) BNF and the Jumper T16. I decided to purchase the iFlight Cineebe 4K because of its 4K camera and it appeared to be easy to fly specifically when using 2S Lipos.
My issue over the last few days since both of my little toys arrived is to try and get them to talk and work with each other. I've spent hours and hours to get them to work with zero success. Being a newbie, I don't know if it's something I'm doing wrong or if it's a problem with the hardware!
Problem Encountered:
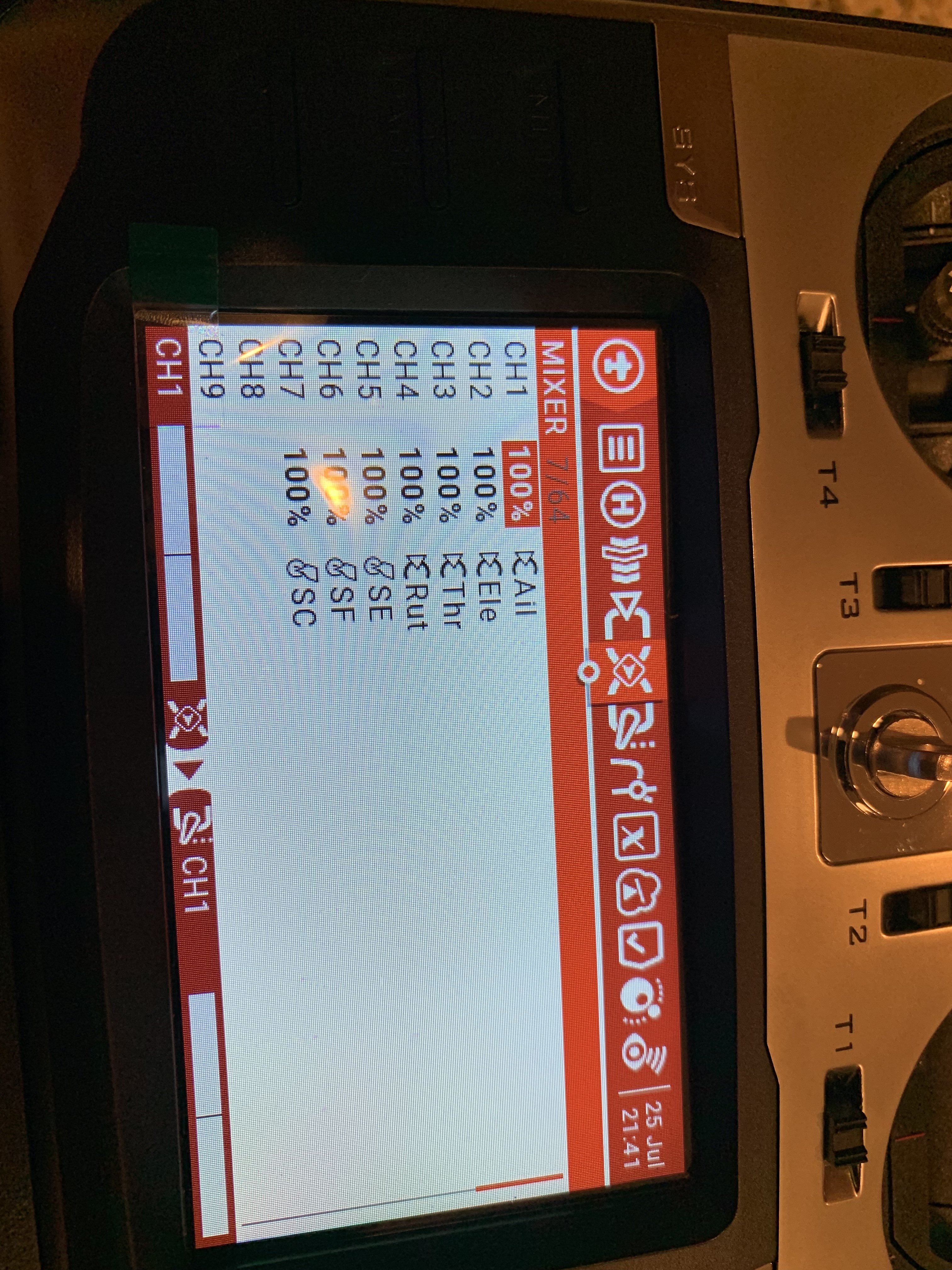
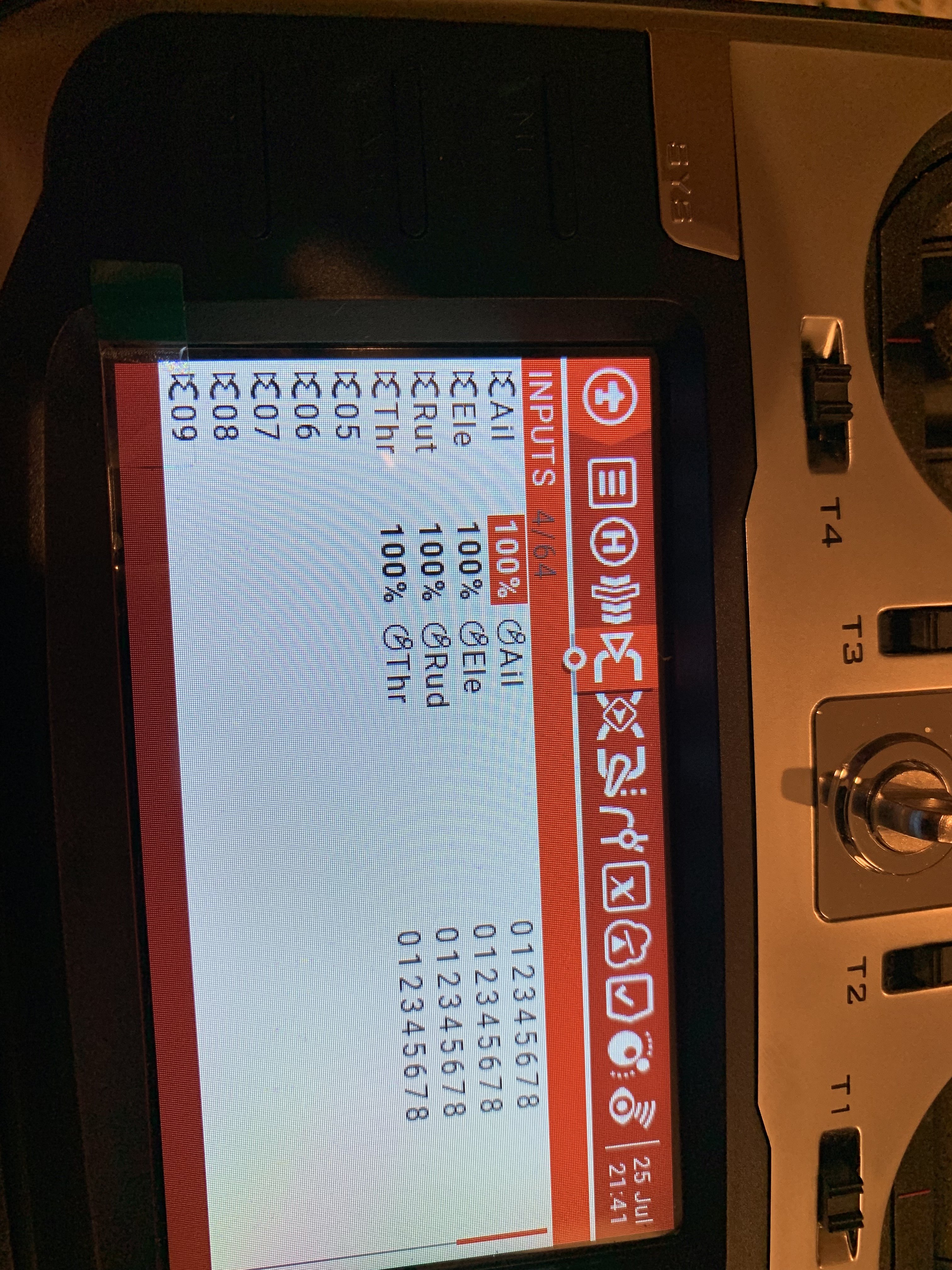
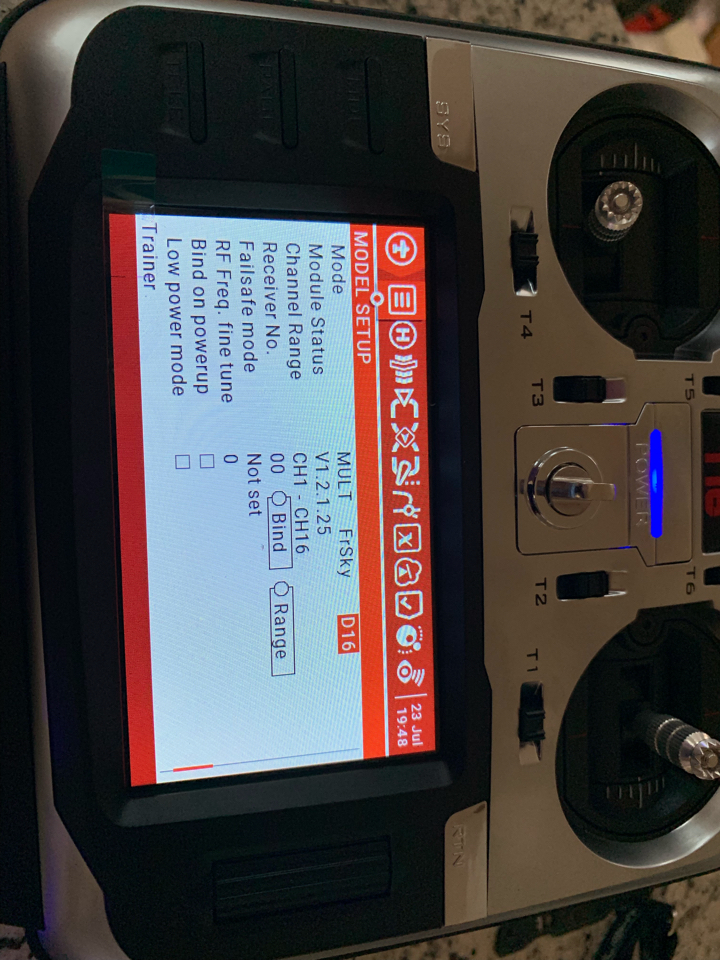
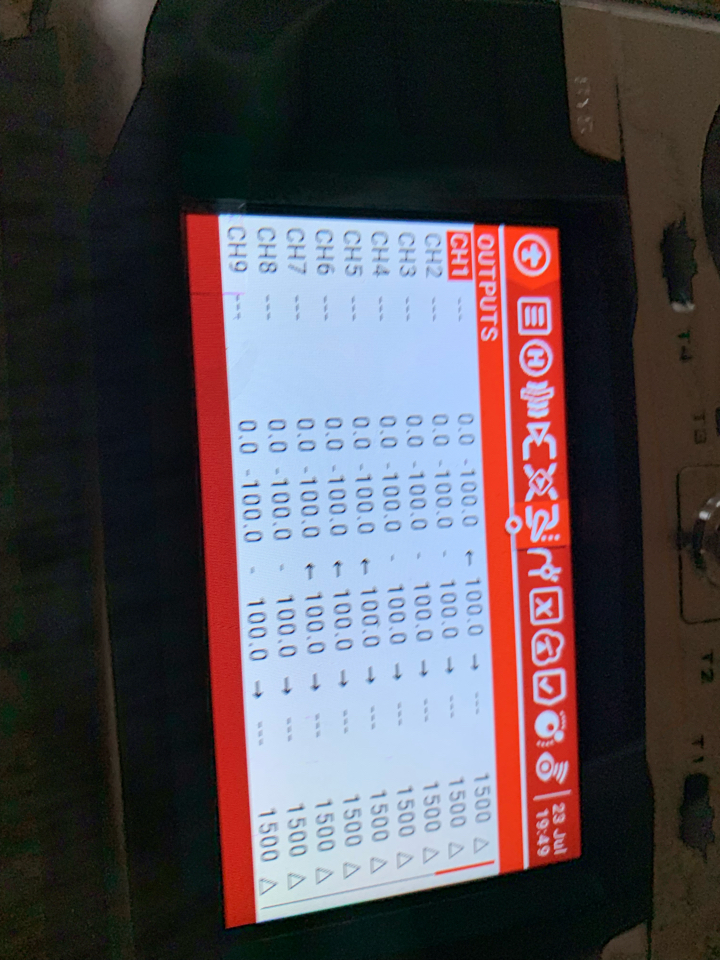
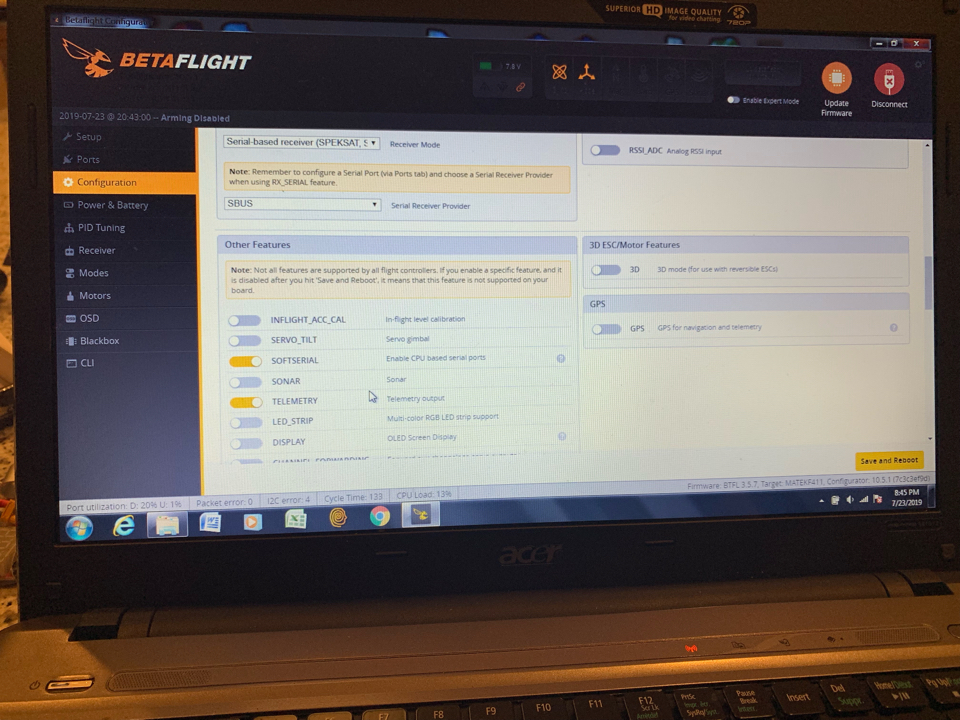
I set a model in my T16 to MULTY FrSky D16 and it seemed to bind. However, I can’t get the quad started. No matter how I move the sticks nothing happens.
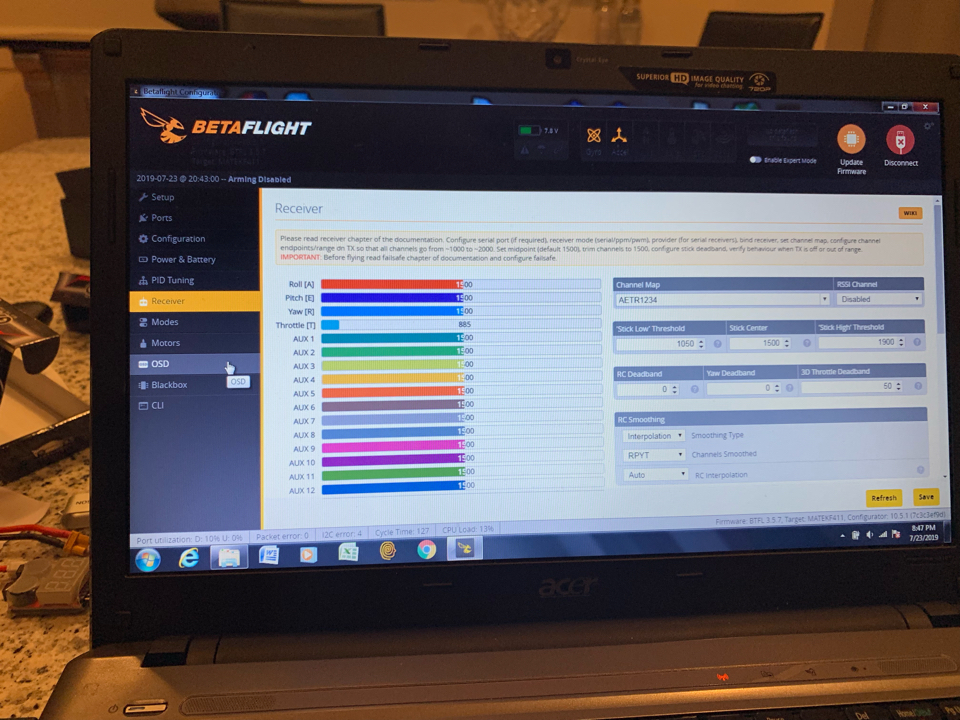
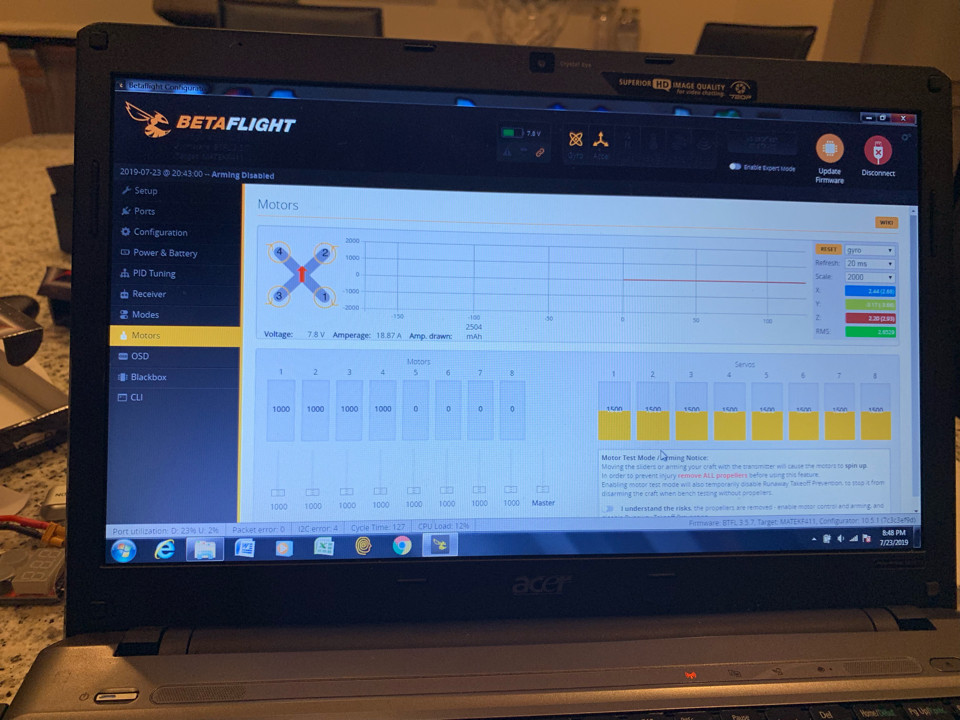
I connected it to BetaFlight and on the Receiver tab, it clearly shows that my sticks are not active as if it is not bound. I have no problems starting the motors manually from the Motors tab on the BetaFlight application.
The interesting thing is that the first time I bounded the quad to the T16, BetaFlight showed that the my joy sticks were reversed in both directions (a sort of Mode 1 with the throttle on the right stick but setup as left to right as opposed to up and down). At this point I decided to re-bind the Cineebe again and from this point on joy sticks have no affect even in BetaFlight.
I tried to use the D8 option, but it doesn’t seem to bind with this protocol
I hope that someone can shed some light on what I'm doing wrong.
I'm just starting to get into this new FPV venture, and so far it has been quite the challenge and a steep learning cure. I don't mind a challenge and thrive on learning new technology, but when there is no base to start from, it can be very frustrating and disheartening! In any event, here is my situation and hope someone can steer me in the right direction:
After reading a number of forums and watching numerous YouTubes, I decided to purchase the iFlight Cineebe 4K (Frsky mini xm+) BNF and the Jumper T16. I decided to purchase the iFlight Cineebe 4K because of its 4K camera and it appeared to be easy to fly specifically when using 2S Lipos.
My issue over the last few days since both of my little toys arrived is to try and get them to talk and work with each other. I've spent hours and hours to get them to work with zero success. Being a newbie, I don't know if it's something I'm doing wrong or if it's a problem with the hardware!
Problem Encountered:
I set a model in my T16 to MULTY FrSky D16 and it seemed to bind. However, I can’t get the quad started. No matter how I move the sticks nothing happens.
I connected it to BetaFlight and on the Receiver tab, it clearly shows that my sticks are not active as if it is not bound. I have no problems starting the motors manually from the Motors tab on the BetaFlight application.
The interesting thing is that the first time I bounded the quad to the T16, BetaFlight showed that the my joy sticks were reversed in both directions (a sort of Mode 1 with the throttle on the right stick but setup as left to right as opposed to up and down). At this point I decided to re-bind the Cineebe again and from this point on joy sticks have no affect even in BetaFlight.
I tried to use the D8 option, but it doesn’t seem to bind with this protocol
I hope that someone can shed some light on what I'm doing wrong.
Attachments
-
 image(07-25-18-40-58).jpg771.6 KB · Views: 0
image(07-25-18-40-58).jpg771.6 KB · Views: 0 -
 image_1(07-25-18-40-58).jpg790.2 KB · Views: 0
image_1(07-25-18-40-58).jpg790.2 KB · Views: 0 -
 image_2(07-25-18-40-58).jpg800.1 KB · Views: 0
image_2(07-25-18-40-58).jpg800.1 KB · Views: 0 -
 image_3(07-25-18-40-58).jpg870.8 KB · Views: 0
image_3(07-25-18-40-58).jpg870.8 KB · Views: 0 -
 image_4(07-25-18-40-58).jpg772.6 KB · Views: 0
image_4(07-25-18-40-58).jpg772.6 KB · Views: 0 -
 image_5(07-25-18-40-58).jpg664 KB · Views: 0
image_5(07-25-18-40-58).jpg664 KB · Views: 0 -
 image_6(07-25-18-40-58).jpg679.2 KB · Views: 0
image_6(07-25-18-40-58).jpg679.2 KB · Views: 0 -
 image_7(07-25-18-40-58).jpg715.6 KB · Views: 0
image_7(07-25-18-40-58).jpg715.6 KB · Views: 0 -
 image_8(07-25-18-40-58).jpg696.5 KB · Views: 0
image_8(07-25-18-40-58).jpg696.5 KB · Views: 0 -
 image_9(07-25-18-40-58).jpg692.1 KB · Views: 0
image_9(07-25-18-40-58).jpg692.1 KB · Views: 0 -
 image_10(07-25-18-40-58).jpg734.2 KB · Views: 0
image_10(07-25-18-40-58).jpg734.2 KB · Views: 0 -
 image_12(07-25-18-40-58).jpg748.7 KB · Views: 0
image_12(07-25-18-40-58).jpg748.7 KB · Views: 0 -
 image_13(07-25-18-40-58).jpg846.8 KB · Views: 0
image_13(07-25-18-40-58).jpg846.8 KB · Views: 0 -
 image_14(07-25-18-40-58).jpg731.1 KB · Views: 0
image_14(07-25-18-40-58).jpg731.1 KB · Views: 0




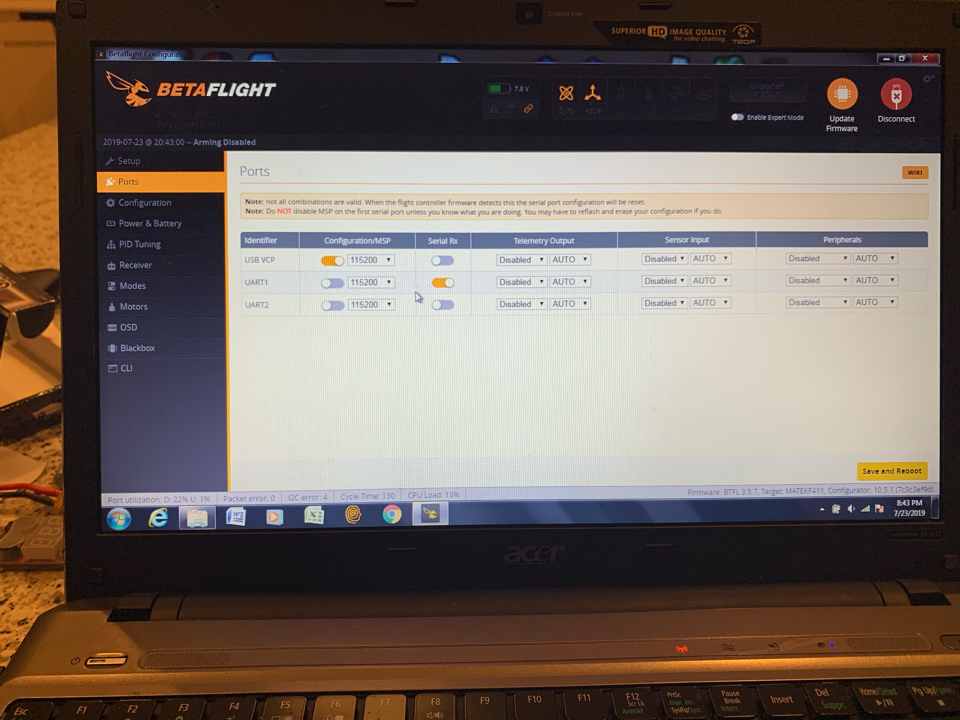


") I think you are not binding, dont worry about anything else until you see them sticks moving in the receiver tab. On the ports page, is that the correct uart for the receiver? (different for different quads wiring). FIRST read up on the lights for your receiver, the lights will tell you if it is binding and if it is bound and receiving stick commands. Another important thing...some receivers wont work without battery power, power it with the battery and then plug into betaflight. Use d8 and rebind.
I think you are not binding, dont worry about anything else until you see them sticks moving in the receiver tab. On the ports page, is that the correct uart for the receiver? (different for different quads wiring). FIRST read up on the lights for your receiver, the lights will tell you if it is binding and if it is bound and receiving stick commands. Another important thing...some receivers wont work without battery power, power it with the battery and then plug into betaflight. Use d8 and rebind.