
Cyberdactyl
Misfit Multirotor Monkey
If your motors are out of alignment where you can't visually see, that isn't the problem. Same with the CG being off a couple inches on a quad your size. But I'm sure you discovered that.
Now it's time to look at more exotic possibilities.
One is the way your board is mounted. I suggest this because I had a very peculiar problem with my tri. I had the KK2 resting on the trimmed-to-size foam box lid it came in, which was stuck to the frame plate by foam tape. The KK2 was attached to the foam by several loops of thread piercing the corners of the foam and looped through the mounting holes. You can make out the thread in the pic below. . .
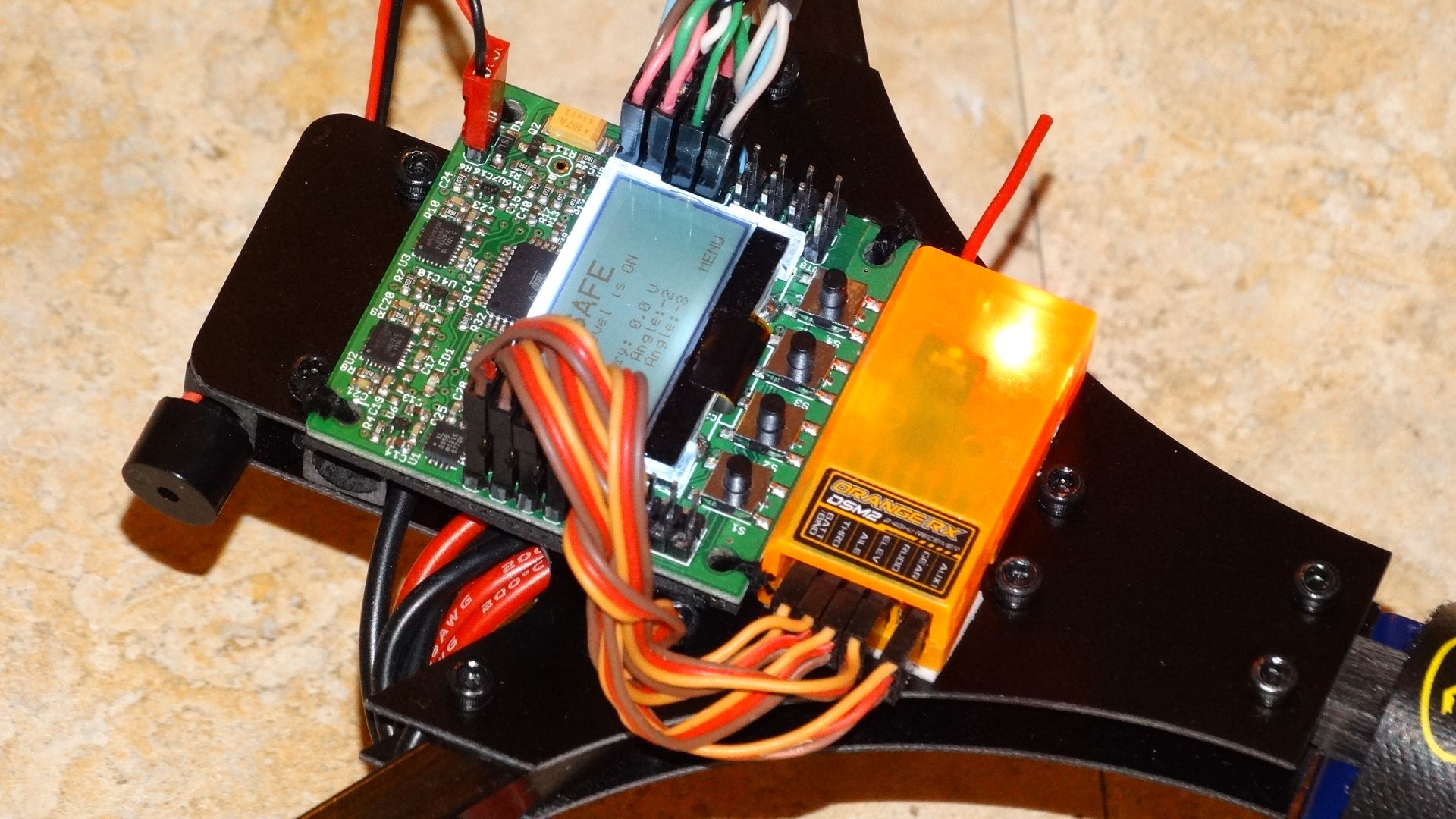
Well. . . this worked GREAT for about three dozen flights. But then I noticed auto level just would not stay tuned in. Once I landed, put it in safe mode, and took off again, it would fly great for about one minute, then slowly start tilting back more and more till it took all my elevator stick up and to the left to keep it level. I was flustered. I looked it ALL over. Tilted mounts, loose props, loose motors in the mounts, loose boom screws, intermittent connections. . . all was good.
Then I spotted it, the corners of the foam had fatigued out and the board was able to move around on the foam fairly loosely. During all this I also noticed the flight time was greatly reduced, pretty much by a third. I thought ALL my batteries were crapping out on me. I suspect the vibrating and moving board was causing an undo amount of gyro and accelerometer activity and compensation to the motors.
I fixed it by merely removing the foam lid and just using another layer of foam tape, making it about 3/16" thick.
Anyway. . . my point is. . . a loose or vibrating board COULD be causing some kind of weird output to those channels.
Now it's time to look at more exotic possibilities.
One is the way your board is mounted. I suggest this because I had a very peculiar problem with my tri. I had the KK2 resting on the trimmed-to-size foam box lid it came in, which was stuck to the frame plate by foam tape. The KK2 was attached to the foam by several loops of thread piercing the corners of the foam and looped through the mounting holes. You can make out the thread in the pic below. . .
Well. . . this worked GREAT for about three dozen flights. But then I noticed auto level just would not stay tuned in. Once I landed, put it in safe mode, and took off again, it would fly great for about one minute, then slowly start tilting back more and more till it took all my elevator stick up and to the left to keep it level. I was flustered. I looked it ALL over. Tilted mounts, loose props, loose motors in the mounts, loose boom screws, intermittent connections. . . all was good.
Then I spotted it, the corners of the foam had fatigued out and the board was able to move around on the foam fairly loosely. During all this I also noticed the flight time was greatly reduced, pretty much by a third. I thought ALL my batteries were crapping out on me. I suspect the vibrating and moving board was causing an undo amount of gyro and accelerometer activity and compensation to the motors.
I fixed it by merely removing the foam lid and just using another layer of foam tape, making it about 3/16" thick.
Anyway. . . my point is. . . a loose or vibrating board COULD be causing some kind of weird output to those channels.

")