VAALLEON
Active member
Going back to the original design and applying what I learned along the way.
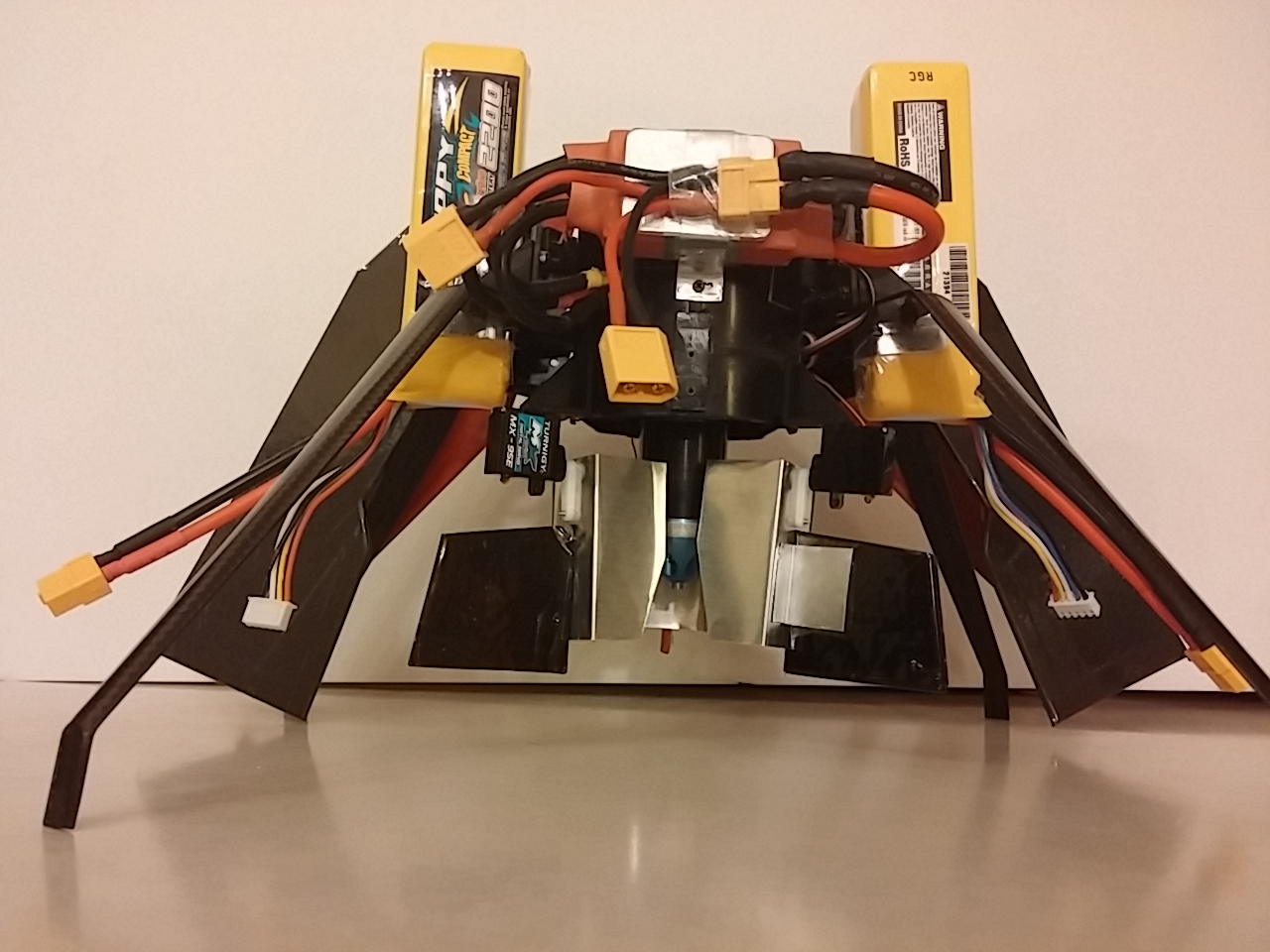
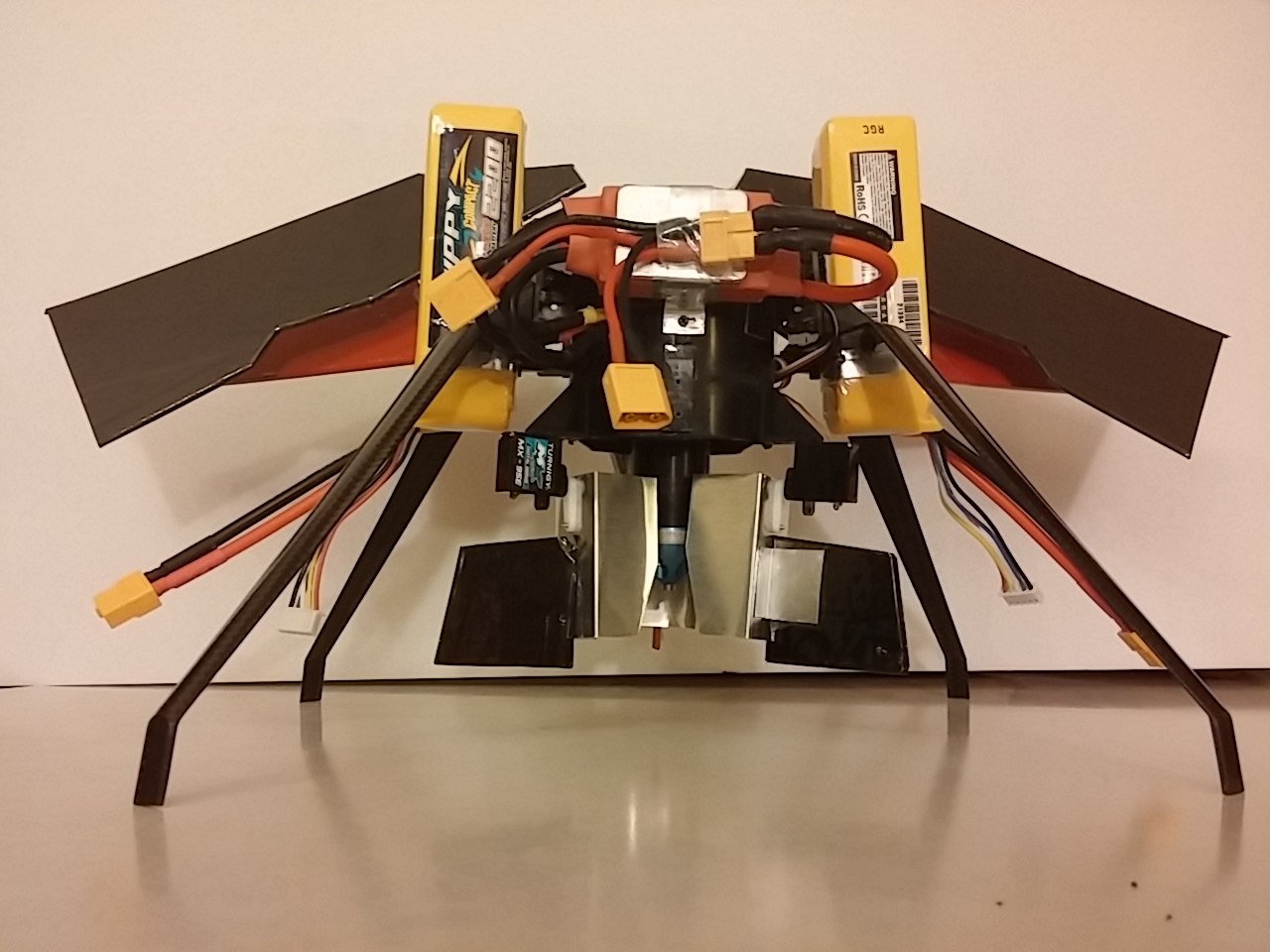
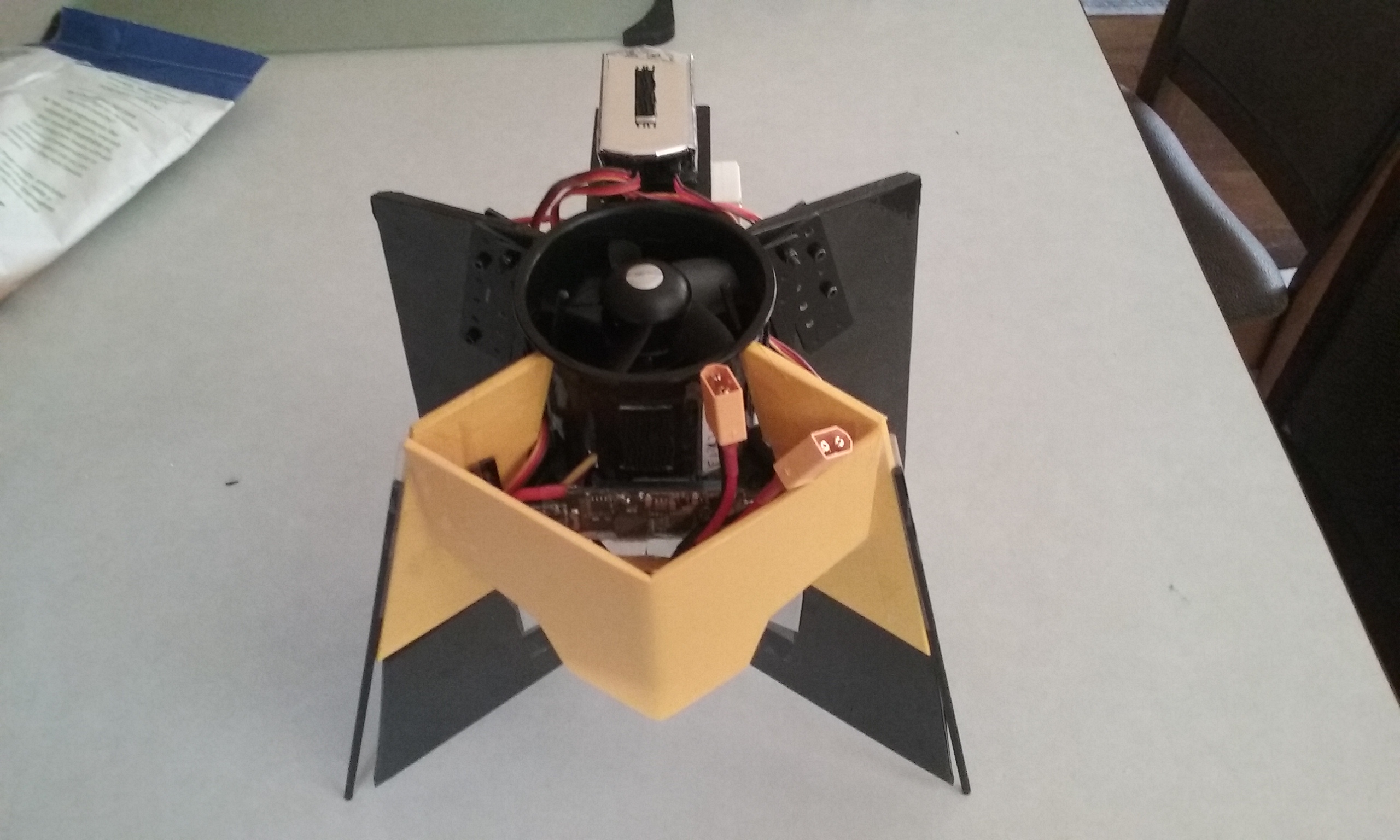
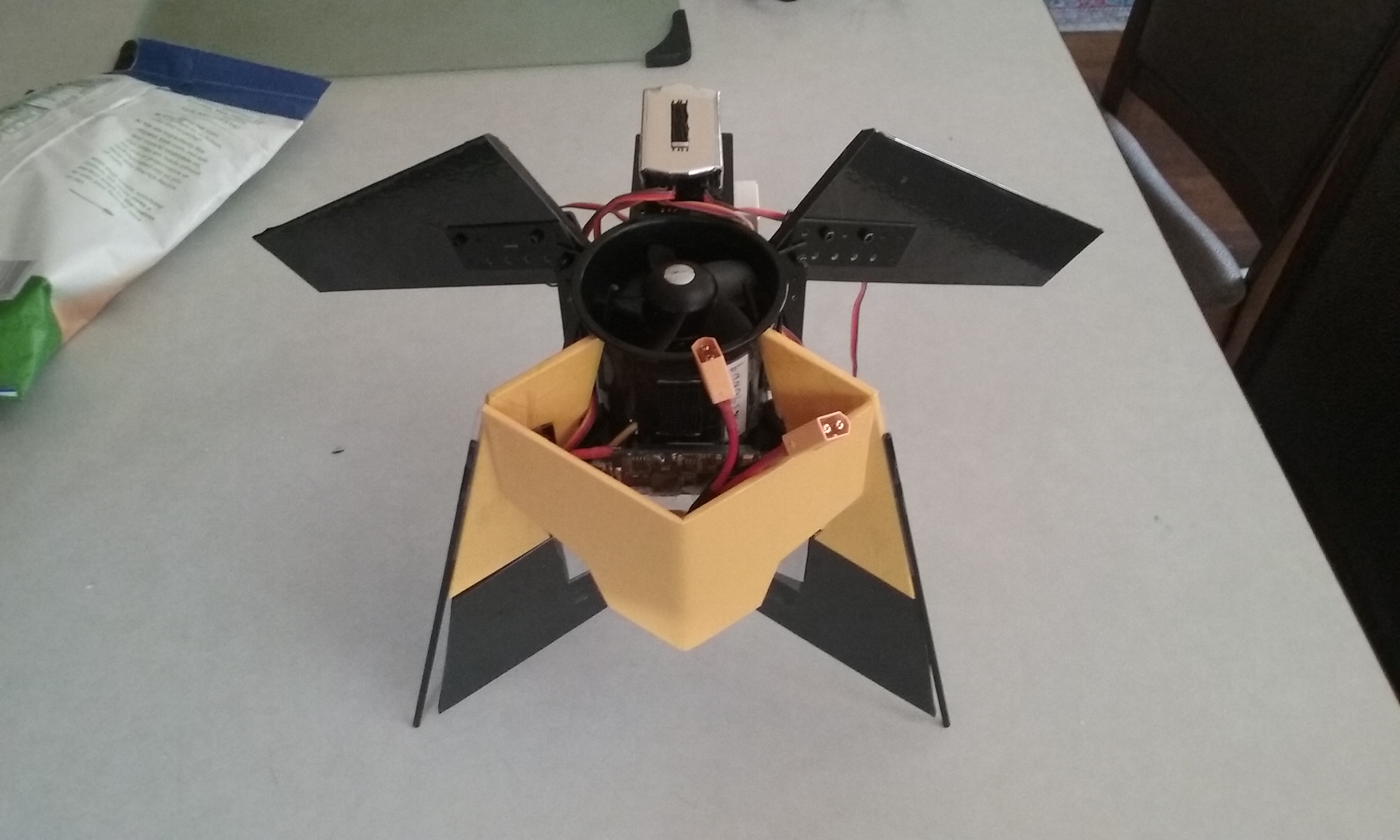
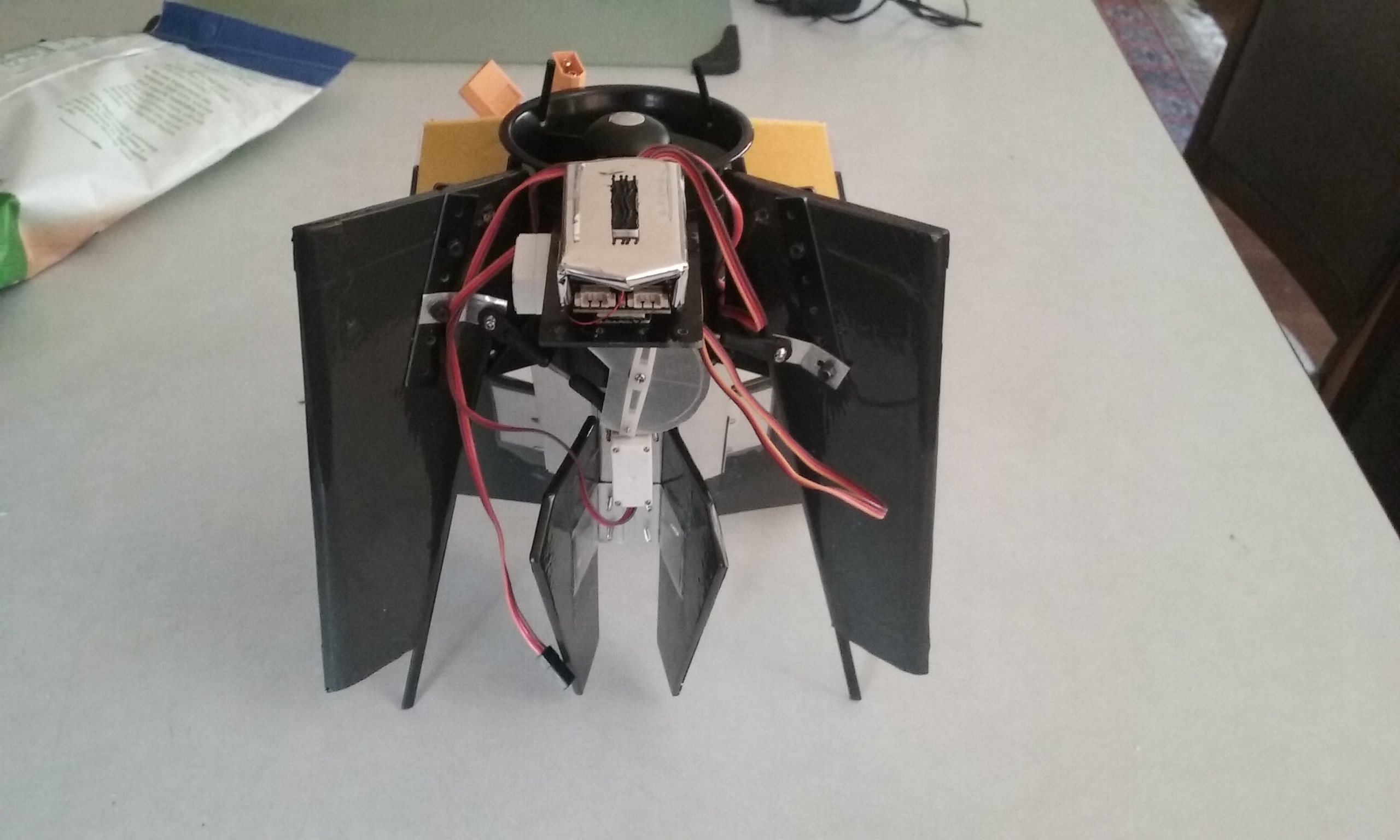
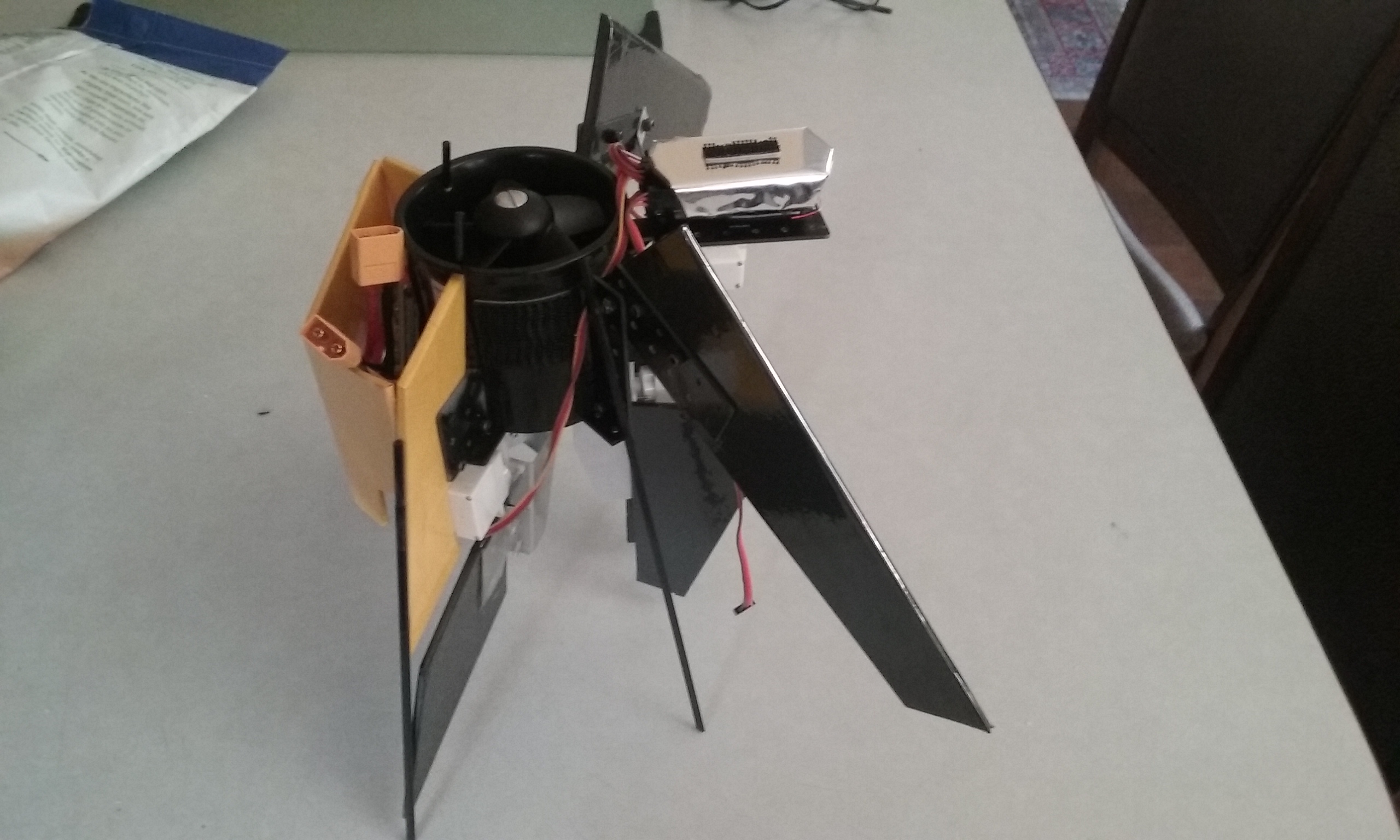
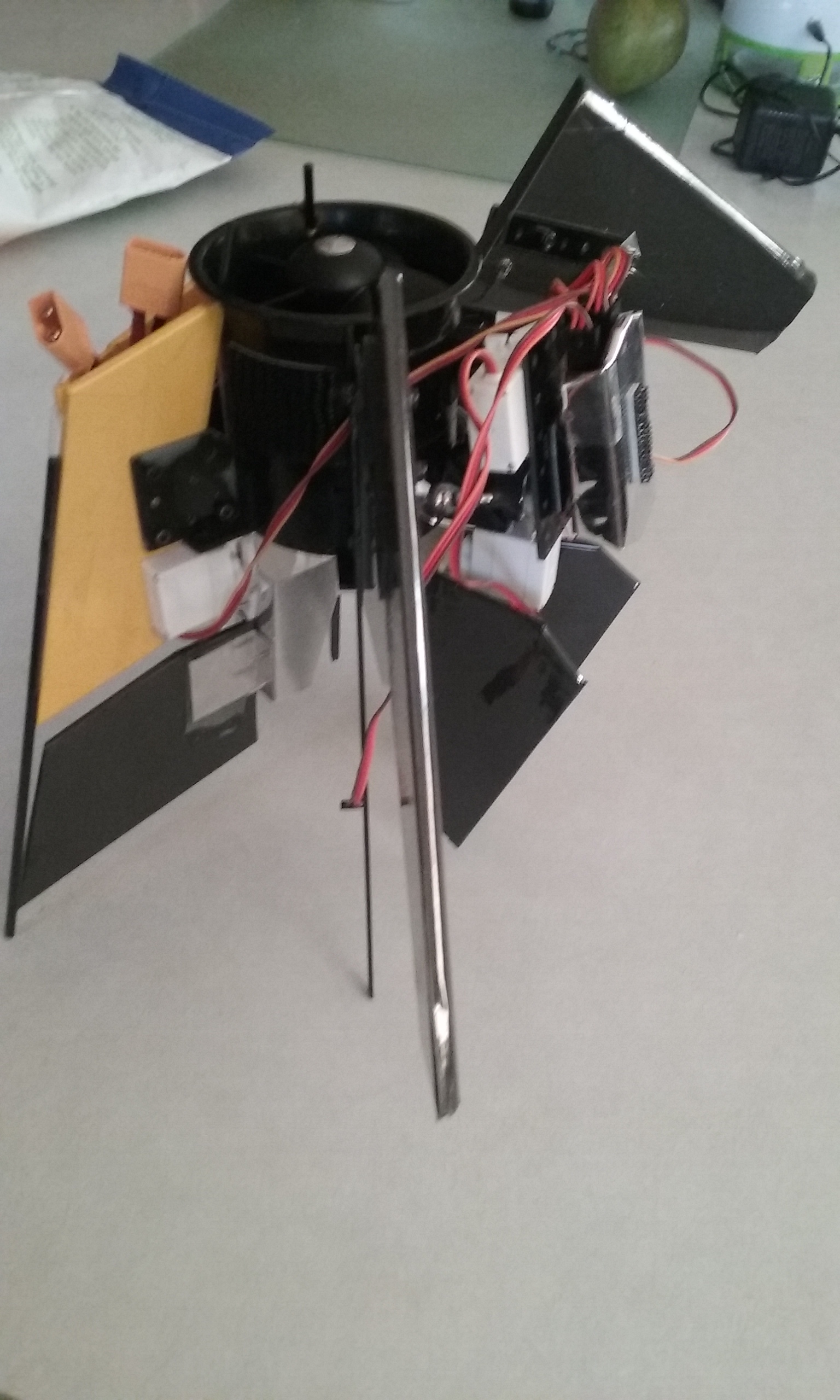
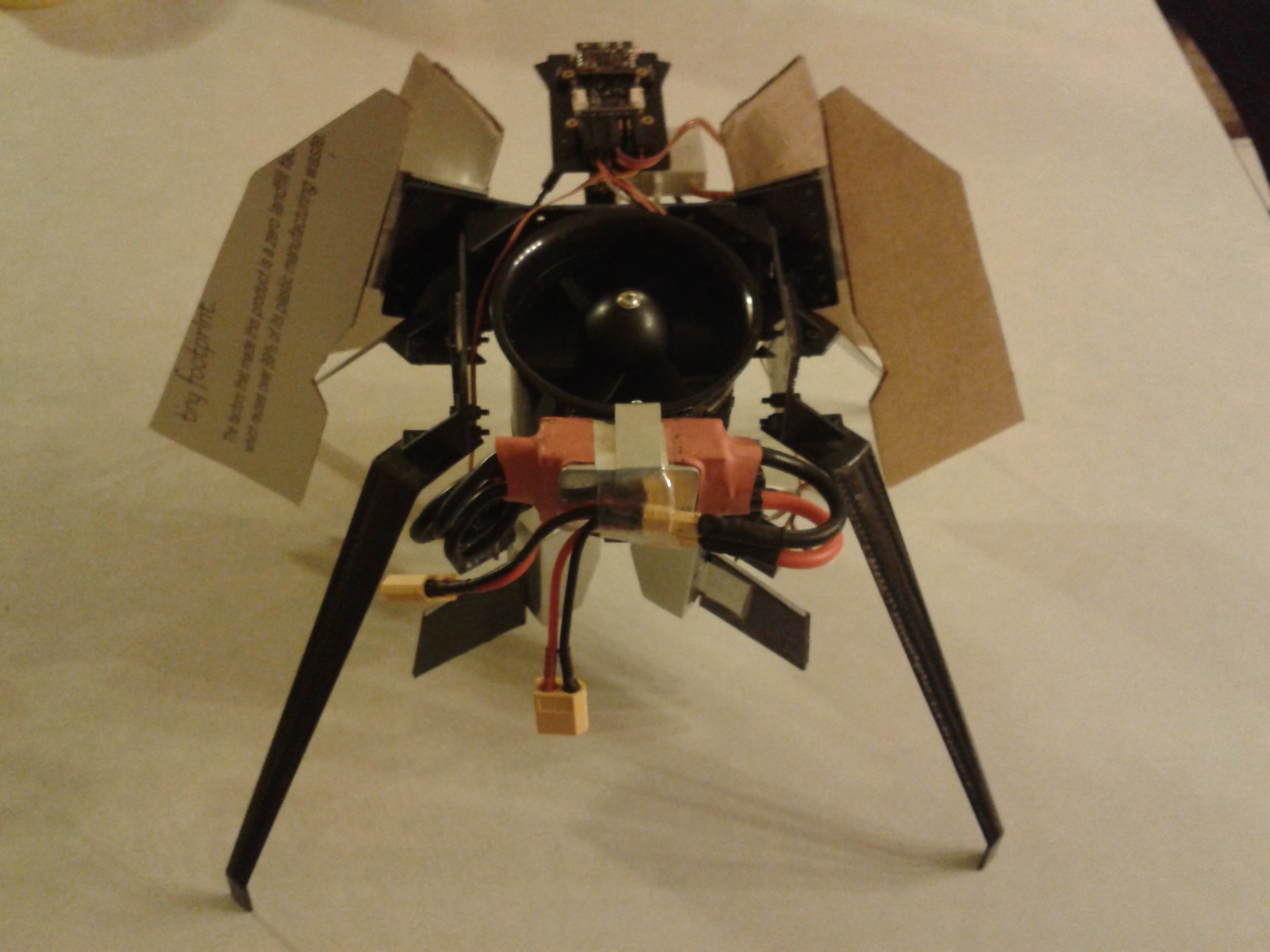
The initial plan was to use the unit as it was with the old split vectoring system but that proved to be less stable and way less efficient. So, I applied the latest 120 degree split thrust vectoring mechanism to the old unit, which also enables me to use smaller servos. The hover flight time jumped up to 5 min. It will fly longer in horizontal flight but I don’t know how much longer, will depend on the wing design.
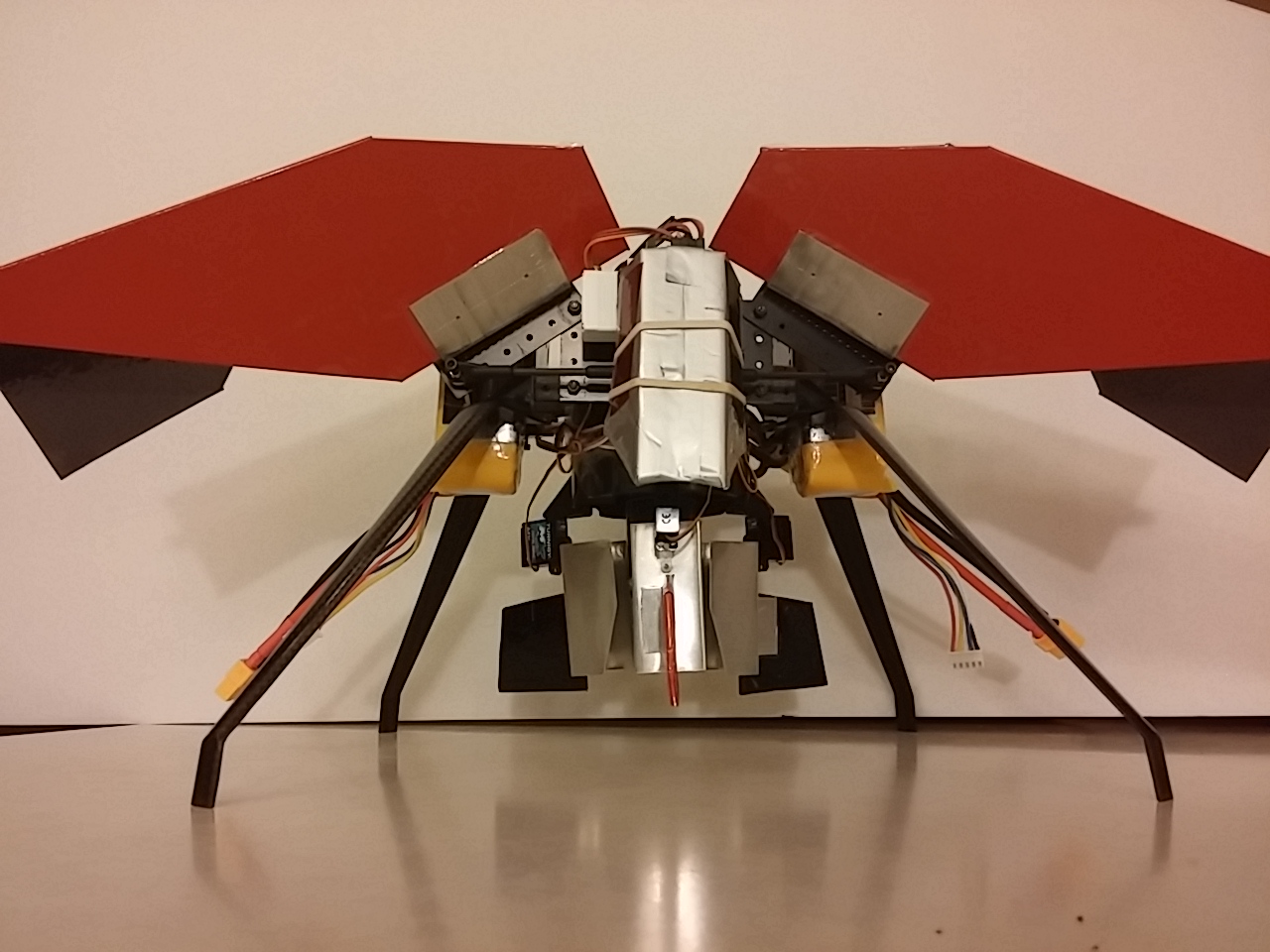
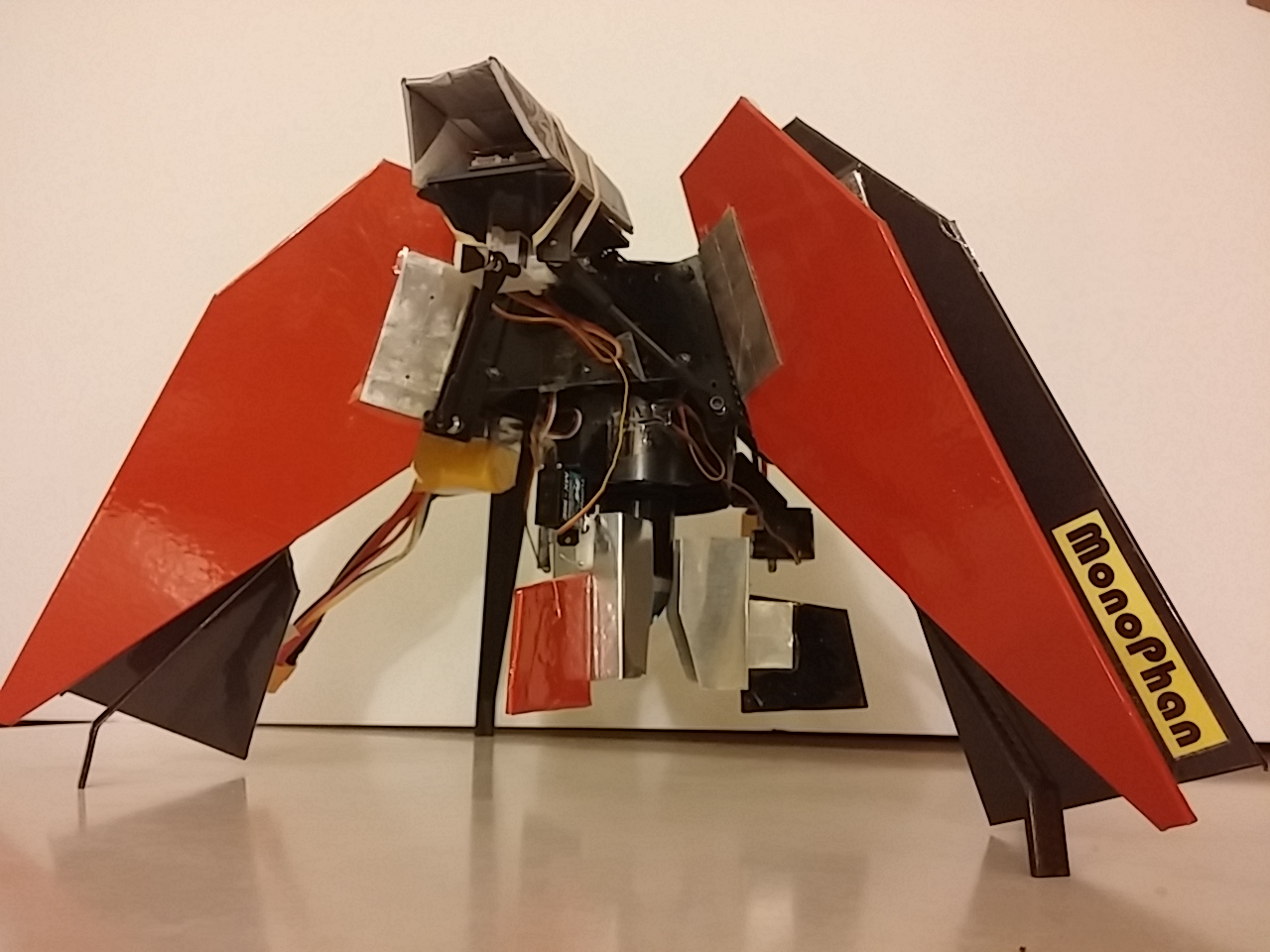
This time I am testing a new sweeping double wing design with a high attack angle. During my tests with the successful folding wing “Phan Rulez” unit, I developed some ideas that I want to test. The design proved to be good for vertical flight during the first test. It looks like it will also support the fast forward. However, the question is if it will successfully transition. These first wings are made of cardboard so that I can cut and shape them as needed. I can also change the sweep and attack angles easily with this design.
Below if the first test flight. A little headwind. There is a 15-20% transition at 1:25 minute mark, just to see how it reacts. It went well. I’ll keep on posting some videos as I progress.
https://www.youtube.com/watch?v=3XYopDmGAKk
The initial plan was to use the unit as it was with the old split vectoring system but that proved to be less stable and way less efficient. So, I applied the latest 120 degree split thrust vectoring mechanism to the old unit, which also enables me to use smaller servos. The hover flight time jumped up to 5 min. It will fly longer in horizontal flight but I don’t know how much longer, will depend on the wing design.
This time I am testing a new sweeping double wing design with a high attack angle. During my tests with the successful folding wing “Phan Rulez” unit, I developed some ideas that I want to test. The design proved to be good for vertical flight during the first test. It looks like it will also support the fast forward. However, the question is if it will successfully transition. These first wings are made of cardboard so that I can cut and shape them as needed. I can also change the sweep and attack angles easily with this design.
Below if the first test flight. A little headwind. There is a 15-20% transition at 1:25 minute mark, just to see how it reacts. It went well. I’ll keep on posting some videos as I progress.
https://www.youtube.com/watch?v=3XYopDmGAKk



")