Resin_Smoker
New member

The other day, we did a few flights in "Acro" mode, one using 4S LiPo and the other with 6S LiPo. The Tricopter was running 1-shot settings (throttle calibrated) on the 4-in-1 ESC with YAW & ROLL P / I settings that are about half of stock. All "D" settings were firmware defaults.
Note: Normally run D-Shot 1200 but tried 1-Shot to see if it made any difference. (It didn't)
Performed an inflight Tailtune on 4S but from what we understand it failed as we didn’t hear the nice beeps just a simple double beep at the end. Beyond this, the Tricopter felt very loose / sloppy in the turns as if the I-term was too low. (corrected this by raising it)
However, Tailwag is a chronic issue (see video's) that doesn't seem to improve no matter what Firmware settings or hardware we've attempted. Thus far we've tried two different flight controllers, 2 different motors types (verified balance within 0.001% gyro deviation @ 50% throttle), three different digital Gyros (with feedback wire) and a whole assortment of 5" propellers.
**Any advice that can be given would be greatly appreciated!**
Tricopter Baby, 4S LiPo
Note: Flight starts off with Tailtune so there is about a minute of hovering about. The Tailwag is readily apparent both in hover and in flight.
LOG: https://drive.google.com/file/d/1kwu5Cp9SJhX7gTkR1HelNW-Ck5aUKb3a/view?usp=sharing
Video: https://www.youtube.com/watch?v=EiOgq_PM_gw&feature=youtu.be
Tricopter Baby, 6S LiPo
Note: 6S flight felt much more stable and locked in than the previous flight, however i forgot to tailtune it for 6S.
LOG: https://drive.google.com/file/d/1IrvttKoifKMfhPkA6z52RplxDdzY4cuq/view?usp=sharing
Video https://www.youtube.com/watch?v=9DshHA3_ovs&feature=youtu.be
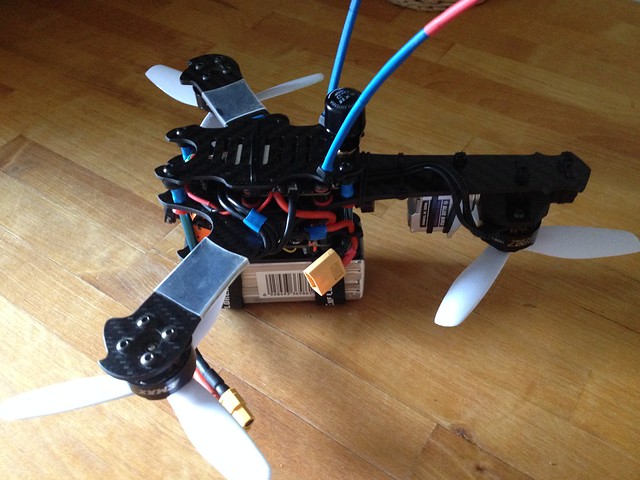
Hardware
Motors: EMAX LS2207-1900kv
ESC: Aikon 4-in-1 ESC
FC: Matek F405-AIO
Propellers: 5x4x3
VTX: Matek 5.8G VTX-HV W/ BFCMS CONTROL
Receiver: Frsky R-XSR with Telemetry
Camera: RunCam Split V2
LiPo: 4S @ 1800 mAh & 6S @ 1250 mAh
Capacitors: 1000uf @ 35v (Battery to 4-in-1 ESC) 470uf @ 35v (VTX voltage input)
Firmware: Triflight 3.2.2 Betaflight
Servo Feedback: Uses the RSSI pad and is set via Betaflight CLI.
DIFF
Triflight on Betaflight 3.2.2 v2 / MATEKF405 (MKF4) 3.2.2 Dec 31 2017 / 15:24:22 (30f68c8) MSP API: 1.36
Resources
resource MOTOR 1 C08
resource MOTOR 2 C09
resource MOTOR 3 C07
resource MOTOR 4 NONE
resource MOTOR 5 NONE
resource MOTOR 6 NONE
resource SERVO 1 C06
resource SERIAL_TX 11 A15
Servo
servo 5 1154 1830 1516 100 -1
Feature
feature AIRMODE
Beeper
beeper -ON_USB
Map
map TAER1234
Serial
serial 30 32 115200 57600 0 115200
Aux
aux 0 0 0 1700 2100
aux 1 1 2 900 1300
aux 2 2 2 1300 1700
aux 3 37 1 1700 2100
Master
set dshot_idle_value = 200
set failsafe_off_delay = 30
set failsafe_throttle = 1100
set failsafe_procedure = AUTO-LAND
set align_board_yaw = 270
set bat_capacity = 1250
set ibata_scale = 165
set tri_tail_servo_speed = 358
set tri_servo_feedback = RSSI
set p_roll = 30
set i_roll = 20
set p_yaw = 30
set i_yaw = 20
Rateprofile
rateprofile 0
set rc_expo = 25
set rc_expo_yaw = 25