uLightMe
Member
I've tried all kinds of things.
1. Ensured motors are not shorted by long screws.
2. Tried BetaFlight 3.1 - 4.0
3. Tried turning off notch filters
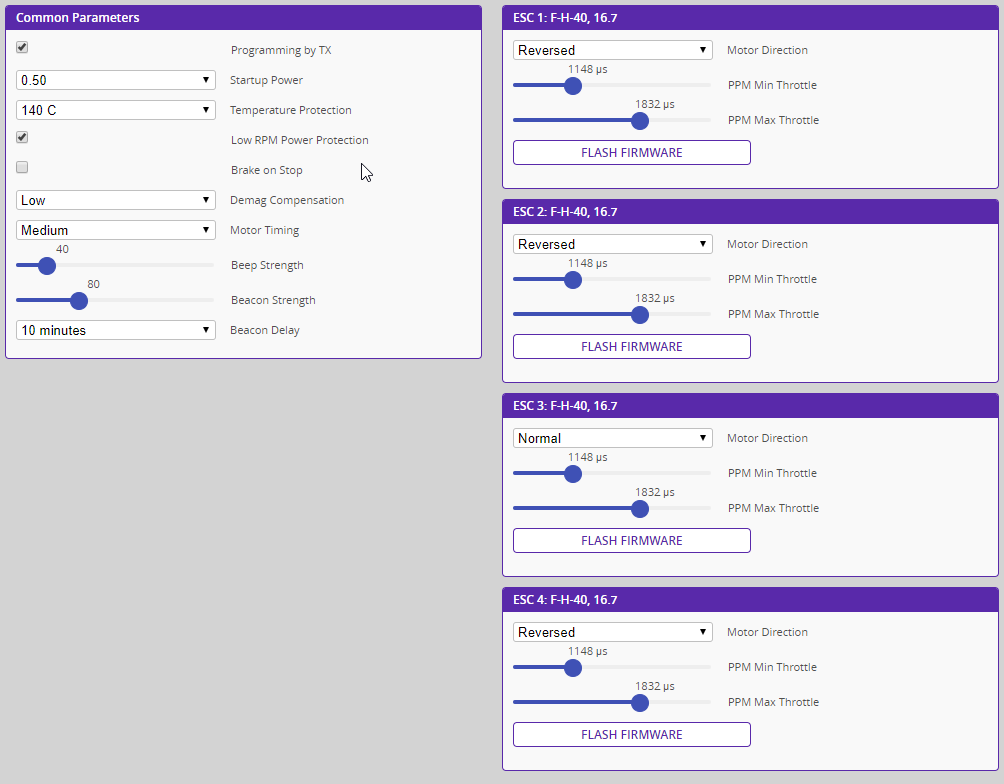
4. Tried changing BLHeli ESC Timing
5. Tried DShot 600 and 200
6. Tried lowering D in the pids all the way to 5
Motors are still running very hot, too hot to grip with fingers for more then 4 seconds. That's after only a 10 second hover in the basement.
I'm afraid they will burn up.
Can anyone suggest anything else I can try doing? I don't think it's possible to soft-mount the FC???
Please help.
1. Ensured motors are not shorted by long screws.
2. Tried BetaFlight 3.1 - 4.0
3. Tried turning off notch filters
4. Tried changing BLHeli ESC Timing
5. Tried DShot 600 and 200
6. Tried lowering D in the pids all the way to 5
Motors are still running very hot, too hot to grip with fingers for more then 4 seconds. That's after only a 10 second hover in the basement.
I'm afraid they will burn up.
Can anyone suggest anything else I can try doing? I don't think it's possible to soft-mount the FC???
Please help.