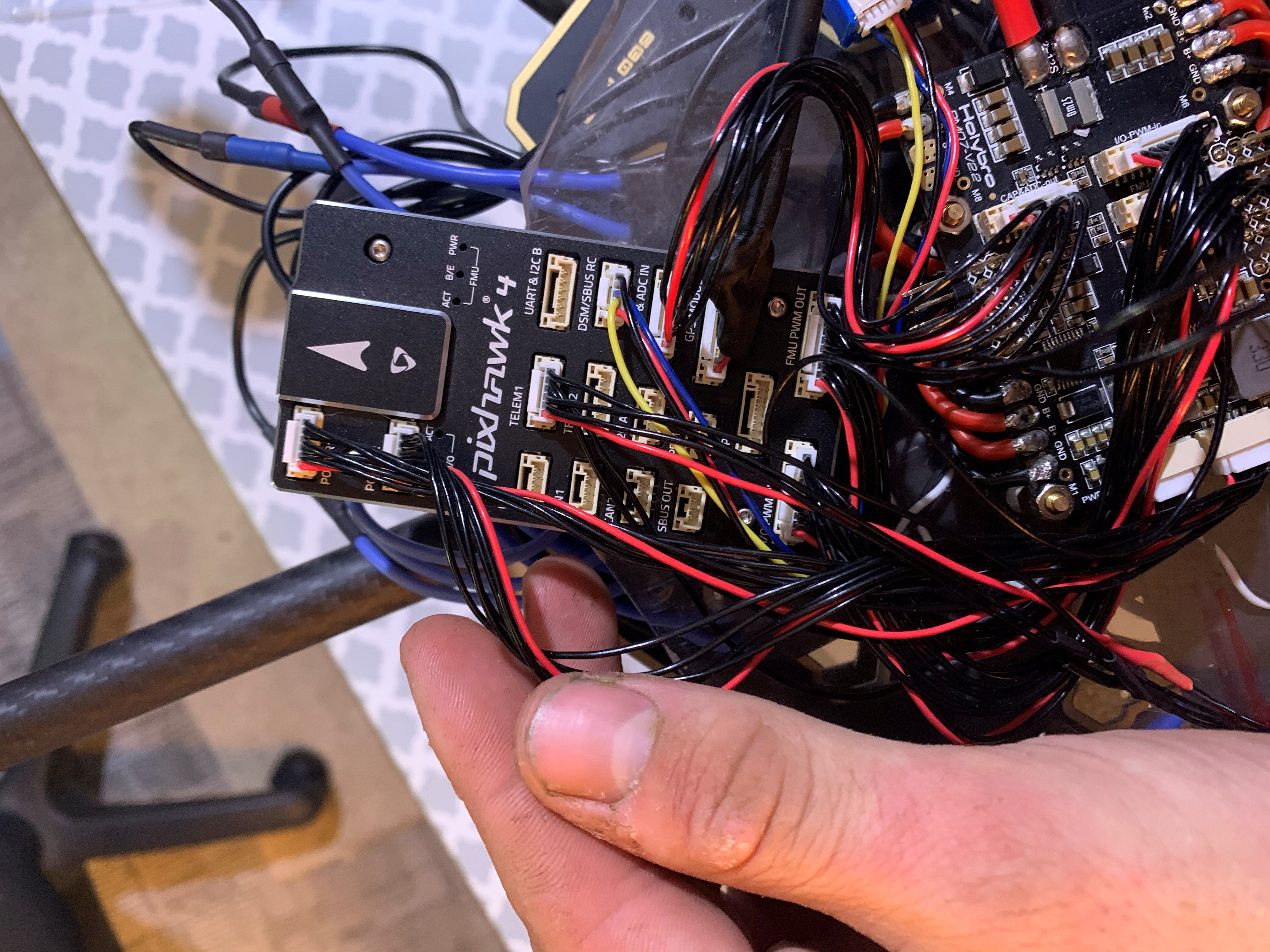
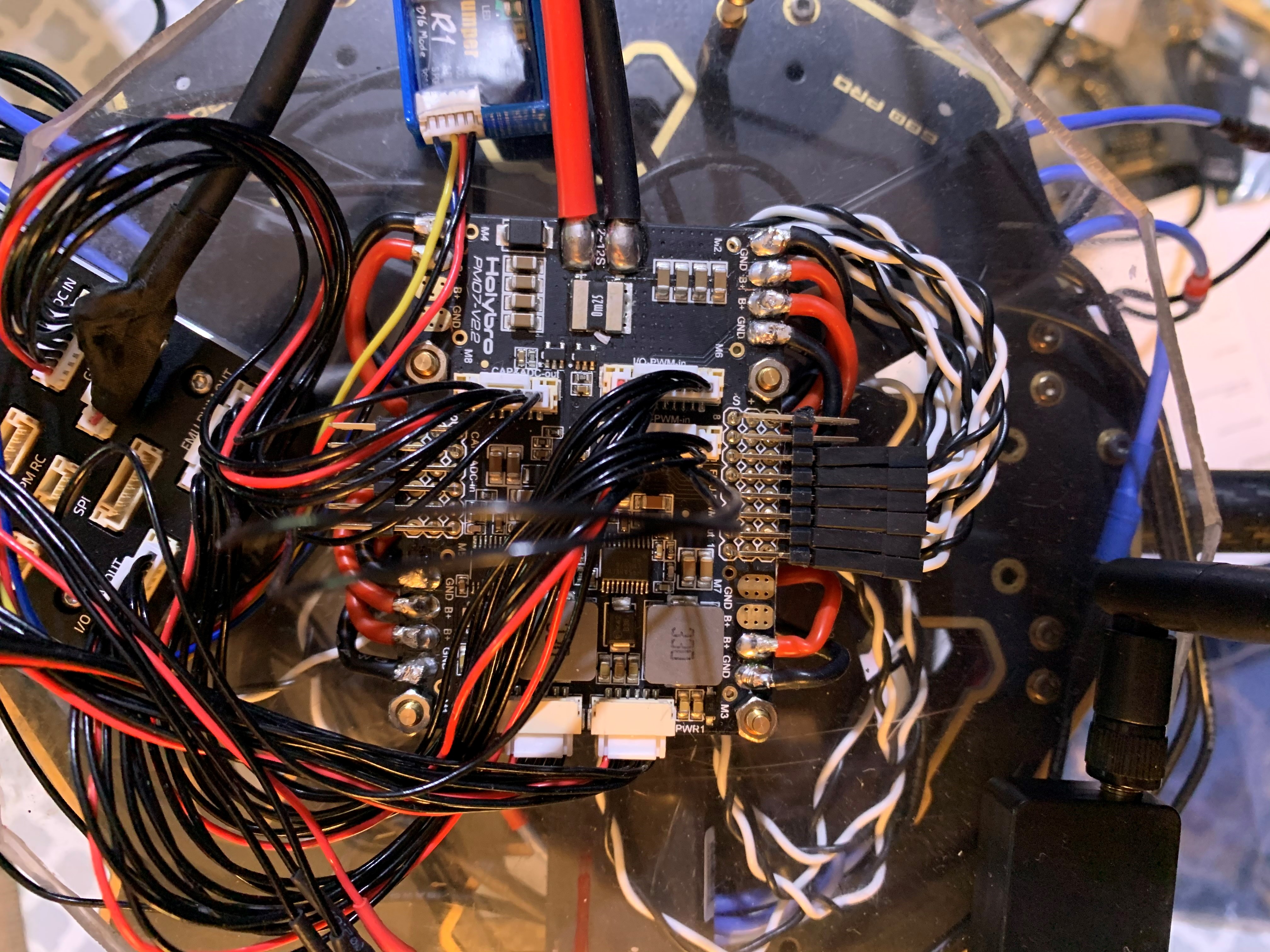
Hello all, I just joined the forum to hopefully pick the brains of some people more knowledgeable in multirotor design than myself. This summer I have been building a hexacopter that will be used for surveying purposes. It's based on the Tarot 680 Pro frame with a Pixhawk 4 FC and power distribution board, T motor U3 motors, Hobbywing Platinum Opto 30A ESC's, Jumper T16 transmitter and a Jumper R1 receiver. Right now I have everything wires and getting power, however I cannot get the ESC's into calibration mode. All that I'm getting is a beep and twitch from each motor every 2 seconds. No noise from the ESC's. I assume this is an issue with the signal going to the ESC, but I am unsure how to go about fixing such an issue. I believe I have everything connected properly to the FC. I'm using Mission Planner to set up the drone. I'm very new to this and never worked with a drone until 2 months ago so forgive me for my inexperience. Thanks!