GeorgeG
Junior Member

I posted an introductory message about some of my model rocket and R/C activities, in the new member part of the Forum:
https://forum.flitetest.com/index.php?threads/new-member-georgeg-rockets-r-c-planes.57127
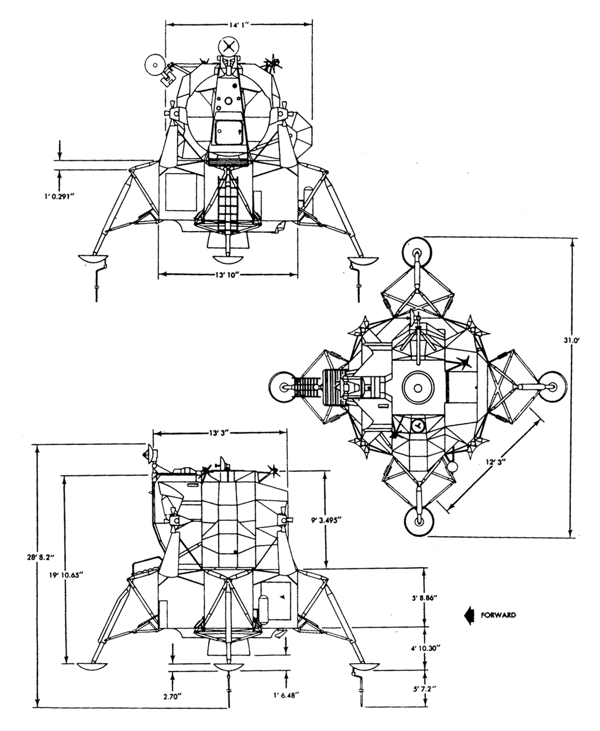
The following is a recap of a Lunar Module Quadcopter project I began in October 2016, though I had been thinking about it since April 2015 (or in another way, since 1970).
Some of the info about the Flight Controller (Mini-APM using Arducopter) and Calibration may be old hat to some of the readers. I originally wrote it for a different audience (Rocketry Forum) who know little about how Multicopters even work. But I left in some of it here for those who are not multirotor fliers, or even MR fliers who use pre-programmed FC’s with limited options compared to what Arducopter can do.
When I got into model rocketry in 1970, there were some “dream projects” I thought would be neat to do someday. A few of them, I’ve ended up doing. And things much later, that I never thought I’d be able to do.
But one of them, seemed so wildly farfetched……it could only be a “dream” and never a reality.
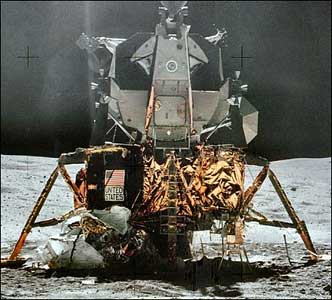
As the Apollo program was going on with lunar landings, I had an idea for an “ultimate dream model” - A model of the Lunar Module that I could fly by R/C, hover, and land (I wasn’t into R/C at all at the time, that too was a dream for someday, maybe). For 1970 an R/C Lunar Module was an insanely impossible model to even think might be possible to do.
But what was even more farfetched at that time was to be able to have R/C small and light enough to be able to control such a model. And most critically have the ability to keep itself level, using technology that in 1970 would have cost millions and weighed dozens of pounds (for the Gyro-based guidance system itself) instead $30 and weighing well under an ounce. Back when a “computer” would require its own room in a house, not fit in your pants pocket or on your wrist.
Well, decades later, all sorts of massive changes for computers, R/C, micro-controllers, and incredibly tiny and accurate gyro and accelerometer sensors (cell phone and “Wii” technology). Improvements in R/C gear, smaller, way better batteries (LiPo’s). And some incredibly brilliant development of a Rube Goldberg flying model contraption called a Multicopter. Using a gang of electric motors and model plane type props to make a helicopter model fly incredibly well, thanks to the use of the tiny gyro and accelerometer chips on the same board as an Arduino type micro controller, programmed to make it fly.
I got to try a few quadcopters, but didn’t really get into it until early 2015. I got a $10 nylon frame for a “250” sized racing quadcopter, found/ordered the parts it would need (like Speed Controllers, motors, props, Flight Controller) and built it. It was incredible to fly, a lot of fun.
And then…. I got to thinking about the old ultimate dream model from 1970.
I could perhaps make a flying R/C Lunar Module, using Multicopter technology! OK, so the original idea was rocket thrust….. but that’s still not practical for me in any case. While in theory an extremely fine-throttleable hybrid rocket motor for hobbyists could maybe be made, it would require lots of hobby dollars and time, and someone else’s expertise to make that happen someday (and even with gimbaling, it would need some means of controlling the roll axis).
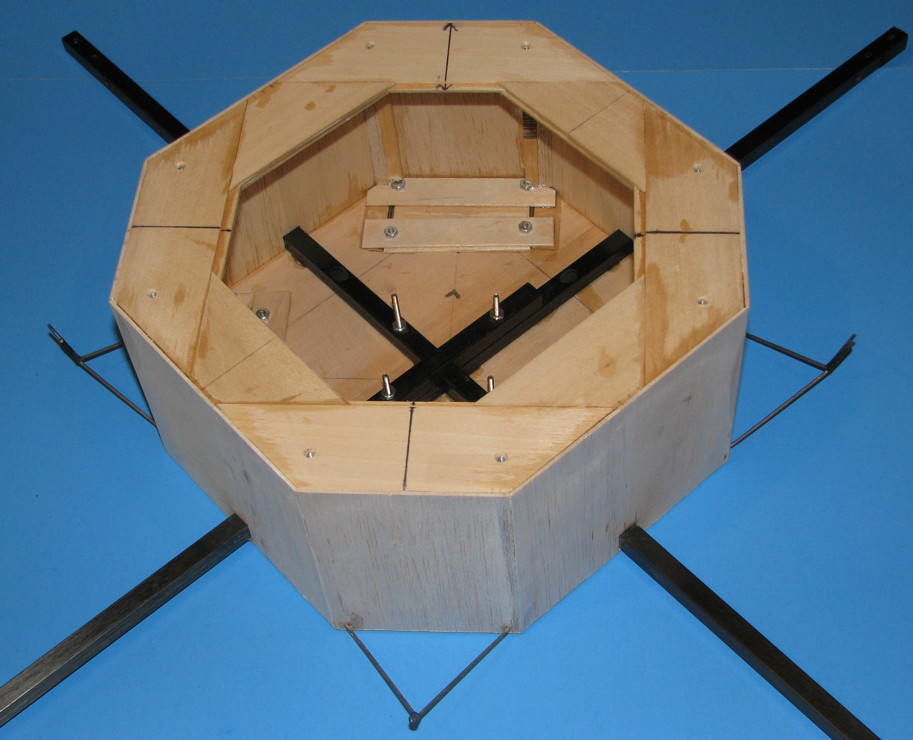
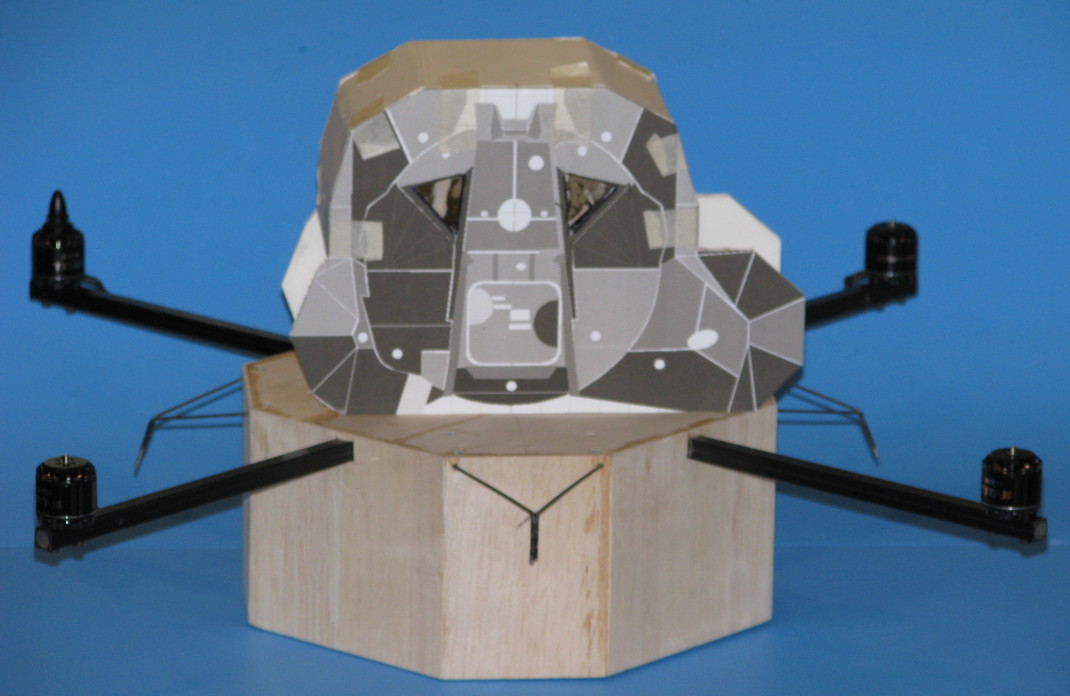
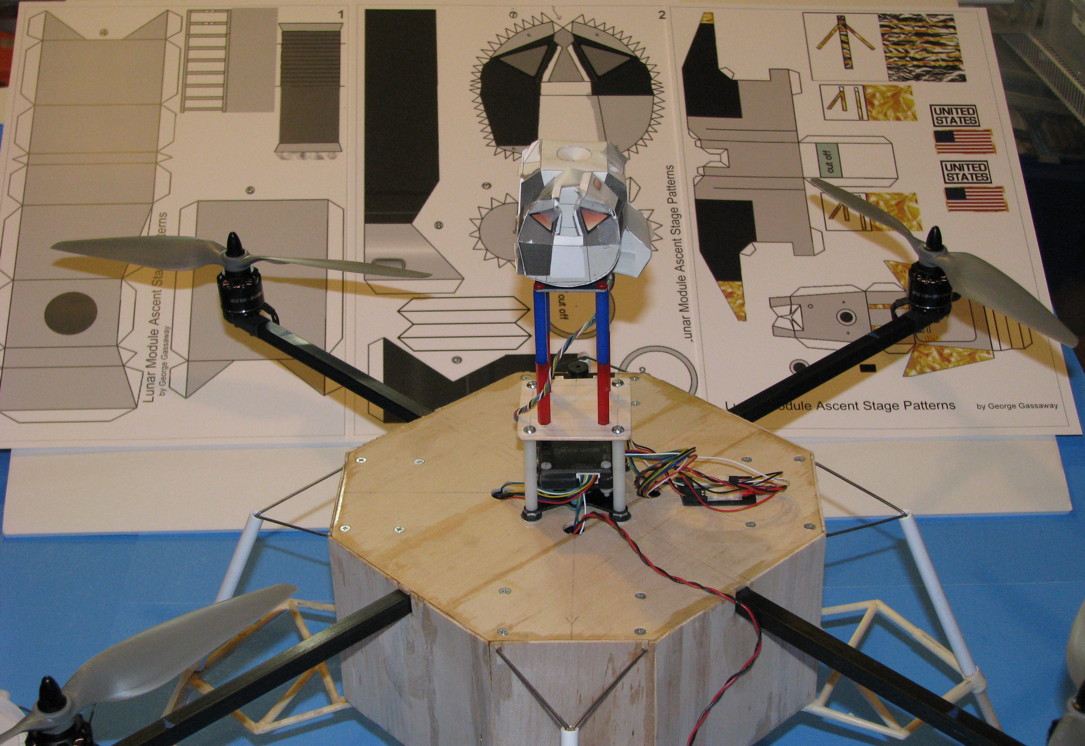
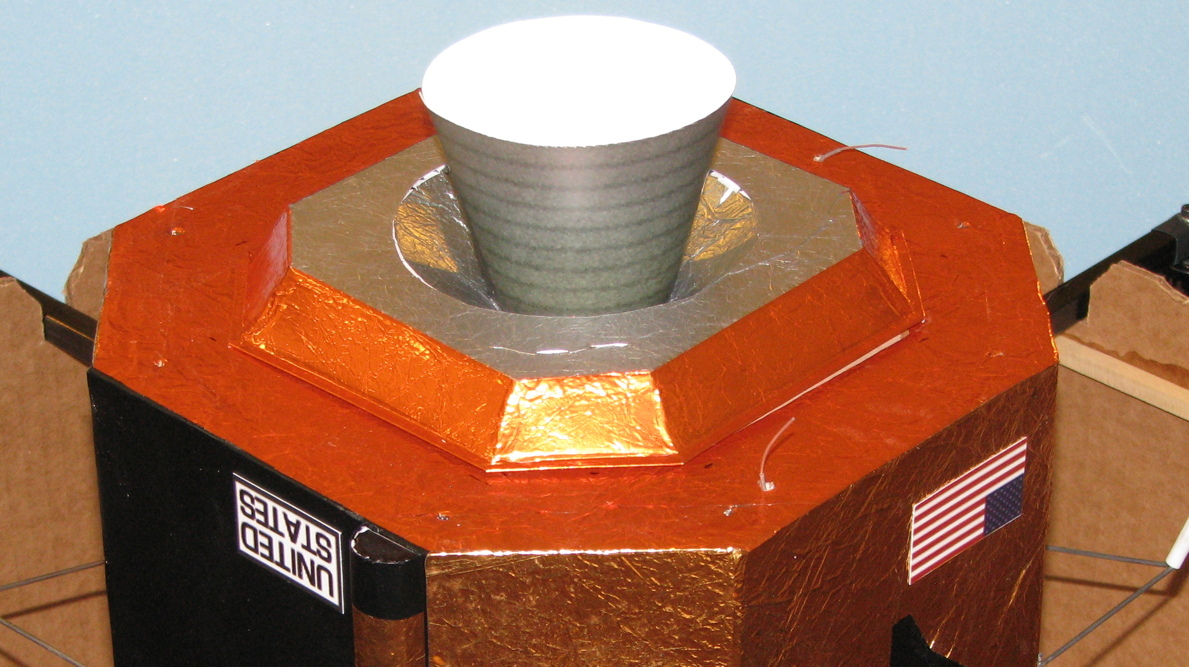
So, I planned to build a Quadcopter version. I even went so far as to make up a very crude octagonal box out of poster paper, to represent the shape of a Descent Stage, and mounted that on top of my 250 Quad. Well, it flew, but it flew like it was “drunk”, from the mass and drag on top, and the way that in the top view the octagonal box blocked some of the airflow from the four propellers, the thrust was reduced and it just did not handle well. But I didn’t expect it to fly great, I just wanted to get some idea of what it would be like. I planned to build a Lunar Module Quad a few months later, fall of 2015. But other things came up, and so I pushed it a year to October 2016.
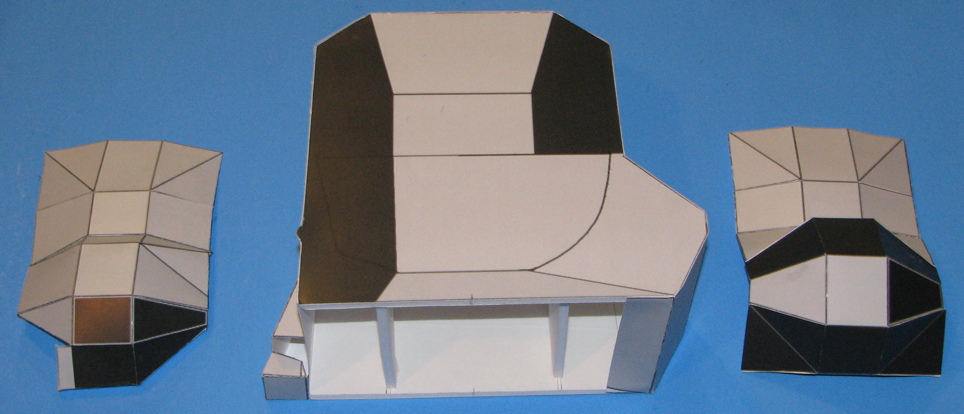
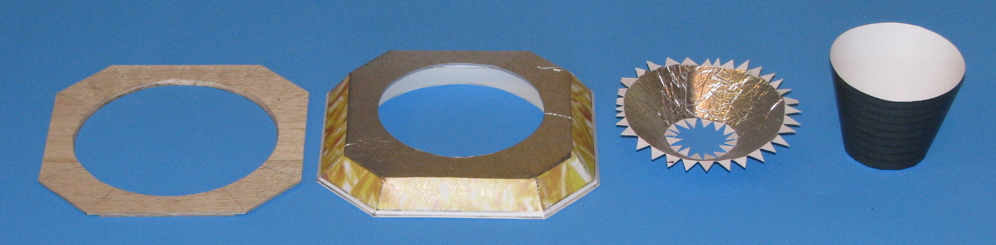
Once I did want to “start building”, well, not so fast. First, a lot of things to figure out. What size? And was I going to build that crazy jigsaw assembly of an Ascent Stage piece by piece from custom hand-drawn patterns and hand-cut pieces? No way! This is a flying project for fun, not a detailed scale project. So for the Ascent Stage, I would use patterns for a cardboard cutout model, printed onto thick poster paper, at a scaled-up size.
OK, even a cardboard cutout model of something like this is not something simple to throw together quickly, but still far easier than drawing up and cutting out pieces from scratch, and painting the various colors. There are several cardboard model options in 1/48 scale. So again, what size? 1/24 would be smaller than I’d like. 1/12 would be really nice, very impressive size. But pretty heavy, requiring some really big powerful motors, more expensive Speed Controllers (ESC’s), more expensive props, and really big expensive batteries.
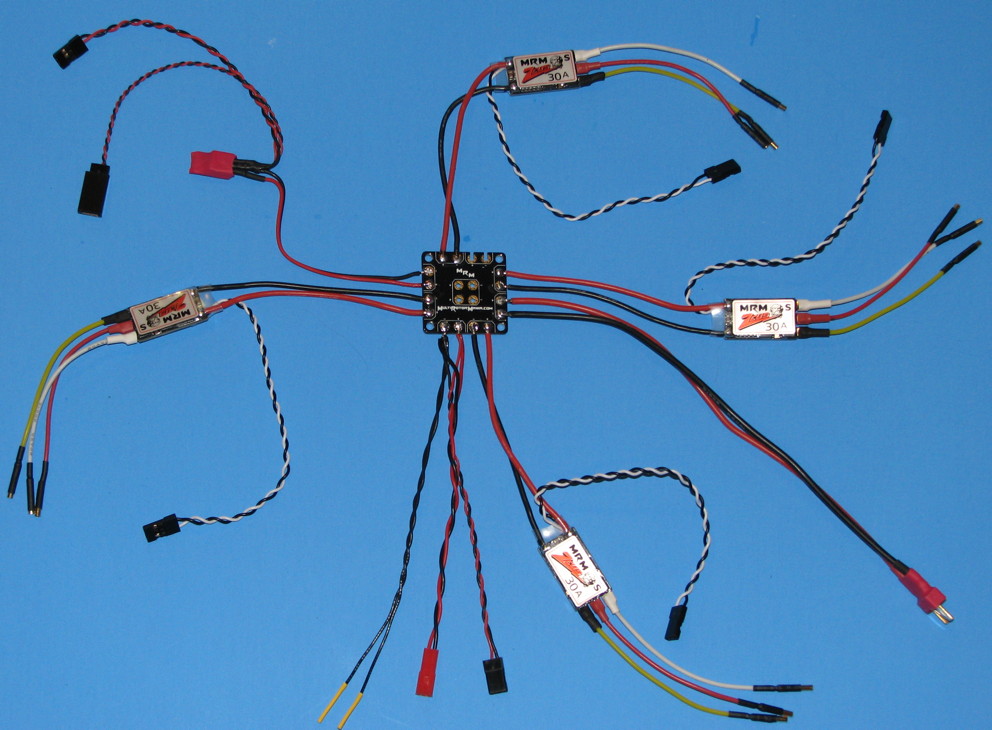
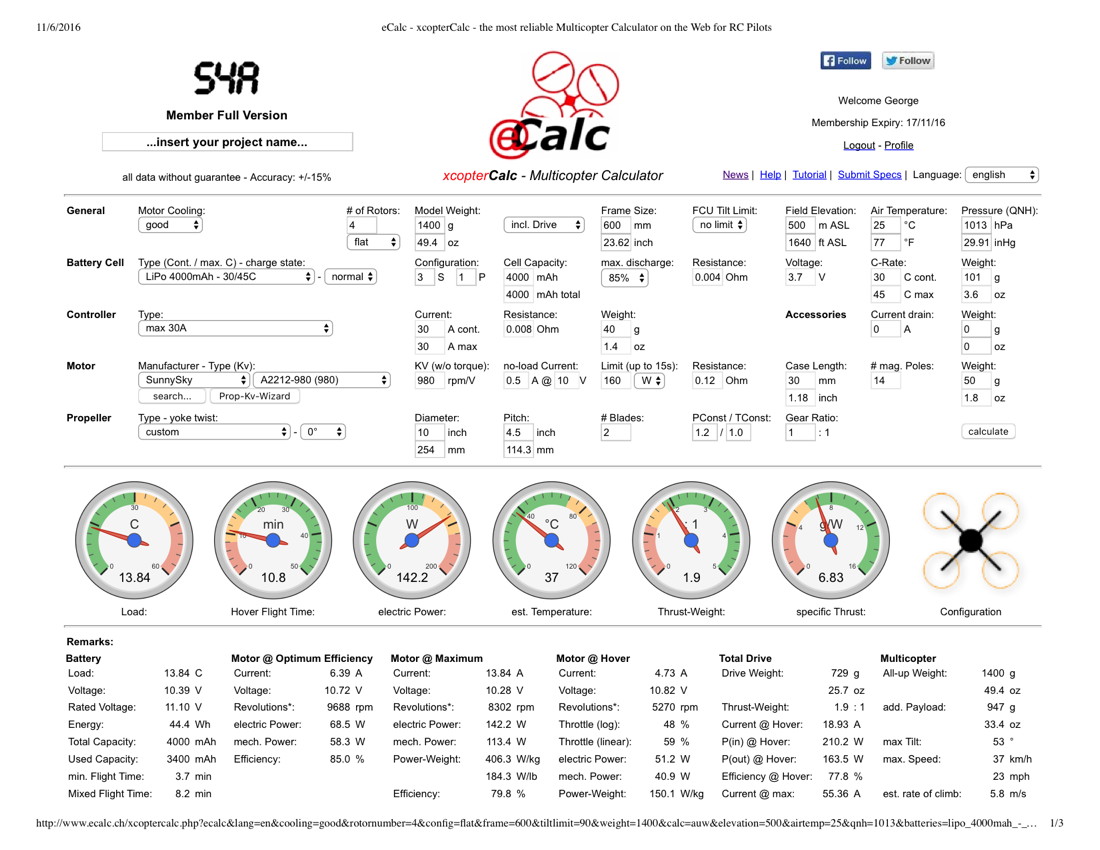
After running some numbers and some guesstimates on the likely mass for the structure, plus the mass of the motors, ESC’s, battery pack and such, 1/16 scale seemed to be about right for what i wanted to do. I figured it might weigh about 1400 grams of so all up weight. I checked into RC groups to ask some questions, compare what kind of motors, props, ESC’s and battery capacity was used for a model of about the size and weight of mine. Based on that, I then tried the components in the multicopter versions of “Ecalc”, to determine flight performance:
The controller runs “Ardupilot” and can be programmed using “APM Mission Planner”
http://www.ardupilot.org/planner/index.html
Last edited: