
confuseddronist
New member
I want to apologize in advance if I am posting to the wrong subforum.
I just built a new drone. The specs are later on in the post. My main problem is that it only climbs and never hovers. This is even an issue at low throttle. Here is a video of what is going on https://www.youtube.com/watch?v=gFsT9RCtNNw. I honestly have no idea what is going on as I have calibrated the compasses and radio through qgroundcontrol and recalibrated the ESCs a bunch of times through this method
. When I spin them using mission planner, they all spin at the same consistent rate.
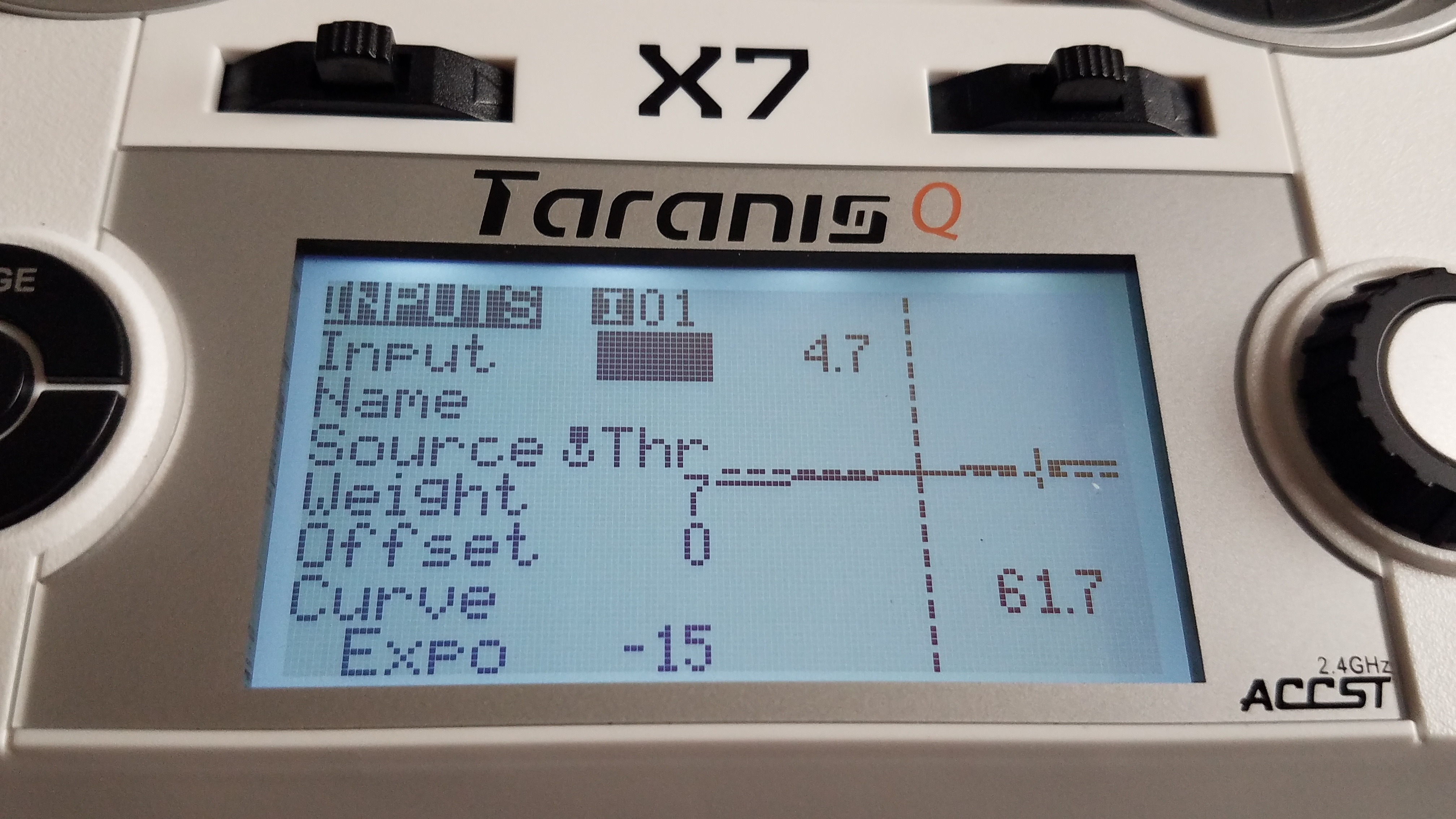
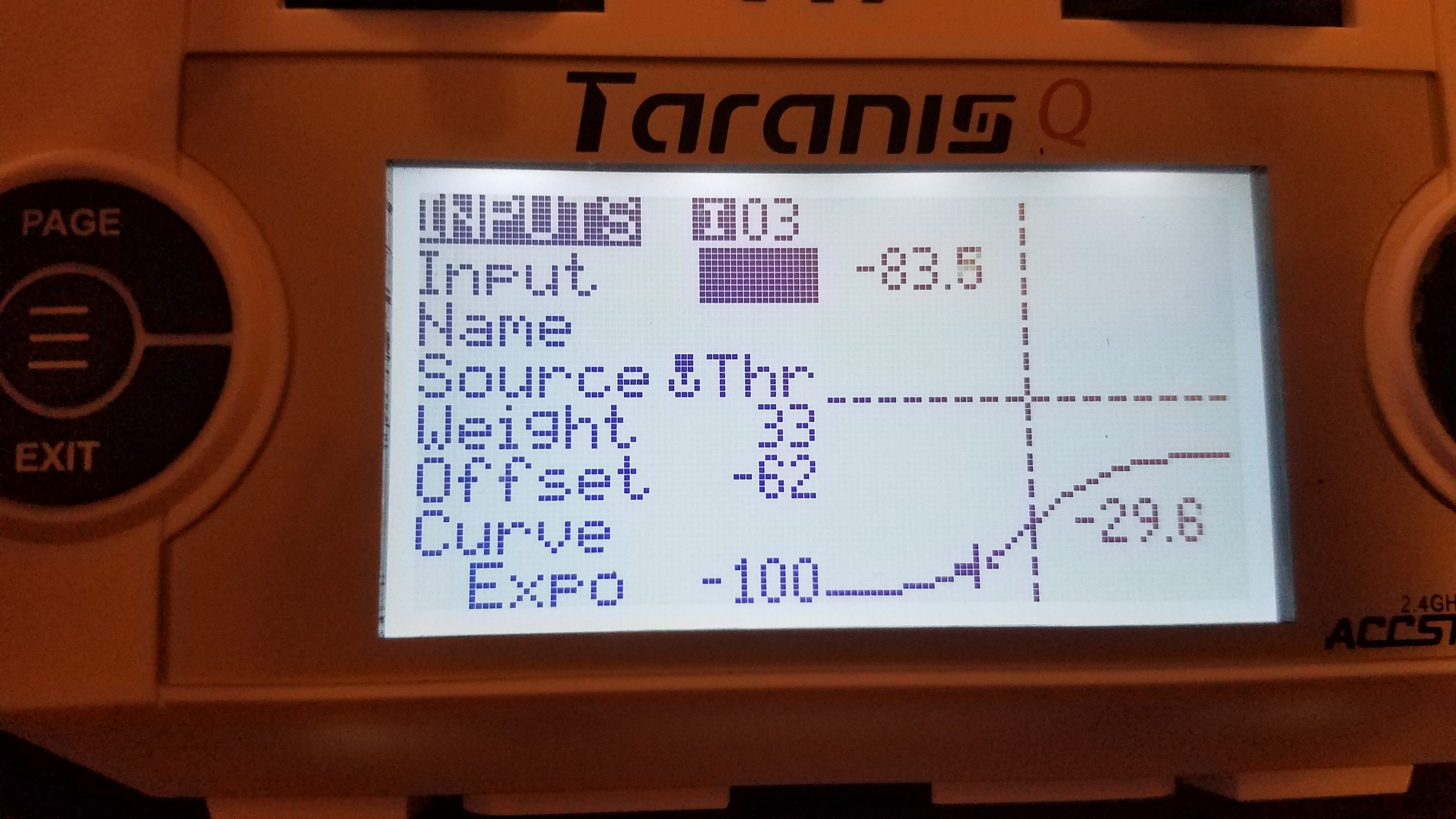
I included a picture of the throttle position at which it climbs like that.
It uses a raspberry pi with an emlid navio2 hat.
https://emlid.com/navio/
I use a taranis qx7 as the transmitter
https://www.frsky-rc.com/product/taranis-q-x7-2/
My motors are racerstar
https://m.racerstar.com/Racerstar-R...CCW-for-220-250-RC-Drone-FPV-Racing-p-33.html
My propellers are 8045s
https://www.amazon.com/dp/B00L59WZZS/?tag=lstir-20
My Escs is a 4 in 1
https://www.banggood.com/Racerstar-...er-p-1068210.html?rmmds=buy&cur_warehouse=USA
I just built a new drone. The specs are later on in the post. My main problem is that it only climbs and never hovers. This is even an issue at low throttle. Here is a video of what is going on https://www.youtube.com/watch?v=gFsT9RCtNNw. I honestly have no idea what is going on as I have calibrated the compasses and radio through qgroundcontrol and recalibrated the ESCs a bunch of times through this method
I included a picture of the throttle position at which it climbs like that.
It uses a raspberry pi with an emlid navio2 hat.
https://emlid.com/navio/
I use a taranis qx7 as the transmitter
https://www.frsky-rc.com/product/taranis-q-x7-2/
My motors are racerstar
https://m.racerstar.com/Racerstar-R...CCW-for-220-250-RC-Drone-FPV-Racing-p-33.html
My propellers are 8045s
https://www.amazon.com/dp/B00L59WZZS/?tag=lstir-20
My Escs is a 4 in 1
https://www.banggood.com/Racerstar-...er-p-1068210.html?rmmds=buy&cur_warehouse=USA



")