hollopeter
Member
Hi all,
I lurk here a lot but have only posted a couple times. I've been flying off and on for years and am looking for a new thing to try. I've watched David Windestal's Flite Test DLG video way too much over the last few years and have done a lot of other research in the hopes to purchase once and not do a slow upgrade over the years spending more and more. So I took advantage of the current exchange rate (thank you Brexit) and got a full carbon DLG from Hyperflight in the UK. It's a 1.5m NRJ. I believe the producer is Anton Ovcharenko from Ukraine. There are a few distributors here in the US but they are all sold out at the moment.
Full disclosure = I am a total DLG rookie (minus tossing an eFlite Whip-it around) and just got it to go fly, at first, quietly at the local ball fields. No F3K competitions planned yet but maybe I'll need a challenge in the future. The minimalism of a DLG looks like a huge amount of relaxing fun. Plus - they seem to hold their value pretty well so if I want to sell it down the road (in good shape), I shouldn't lose too much of my investment. Not something I can usually say with my meager fleet these days.
So... I will do my best to document the build. This is also my first build of a glider that is unpowered and needs more attention to detail than the couple Horizon Hobby sailplanes I've had in the past.
Ordered from Hyperflight in the UK on June 5th. A blue/white NRJ with their 'standard' carbon layup (there are also light and strong versions) plus 4 of the recommended servos. They were fast in communication and gave me a tracking number to follow it through local shipping, customs, and through customs in the US. From there, the tracking number went quiet but only a day or so after the last update it arrived on my porch.
I didn't get a picture of the unboxing, but it was well secured in a couple layer thick corrugated cardboard box and all parts were bubble wrapped and taped together spaced to sit in the middle. It arrived safe and sound without a scratch. I'll take some pictures soon with all parts on the scale and post them but I wanted to get the tread started and force myself into good documentation! There are a few build logs out there but most of those know what they're doing so I thought I'd add some rookie experience to the internet.
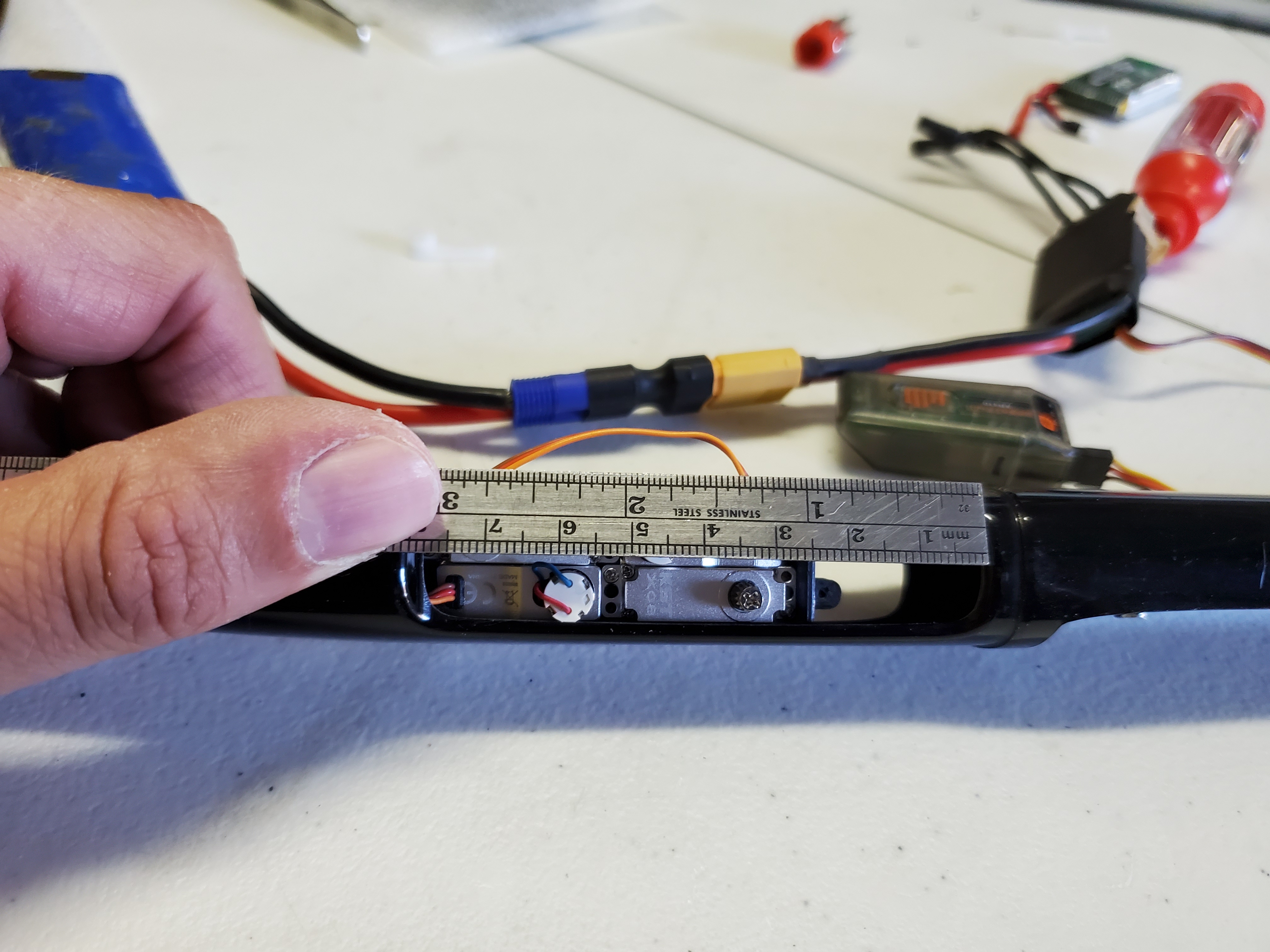
First impressions are WOW the build quality is really nice. And even though I knew it would be lightweight and tough to package, I'm not sure I realized quite how much lightweight and tough. The receiver and battery I pre-purchased may not both simultaneously go where they need to. The servo tray and servos in all of the instructions I looked up were photographed fairly close so I didn't realize how tiny they are.
Weights -
Fuselage and nosecone - 39 grams
4 KST X08 servos - 35 grams
3D printed servo holder - 5 grams
Turnigy 1S 750 mAh Lipo - 19 grams, though I need to find a smaller one or a longer/thinner one.
Spektrum AR410 4 channel Rx (without plastic case - it won't fit unless it's stripped down) - 3 grams
Horizontal stabilizer - 5 grams
Rudder - 6 grams
Wing - 91 grams
Miscellaneous bag-o-hardware for assembly - 12 grams.
By my math that's 215 grams total minus the little bit of glue I'll need. There are also ballast weights that (I think) are used to help in windier weather but a set for about $50 seemed pretty steep since all it looks like is adhesive wheel weights shrink wrapped to specific lengths of wires. I think that should be easy enough to reproduce for a tenth of the price but I'll cross that bridge when I get to it.
I'll start the build tonight!
I lurk here a lot but have only posted a couple times. I've been flying off and on for years and am looking for a new thing to try. I've watched David Windestal's Flite Test DLG video way too much over the last few years and have done a lot of other research in the hopes to purchase once and not do a slow upgrade over the years spending more and more. So I took advantage of the current exchange rate (thank you Brexit) and got a full carbon DLG from Hyperflight in the UK. It's a 1.5m NRJ. I believe the producer is Anton Ovcharenko from Ukraine. There are a few distributors here in the US but they are all sold out at the moment.
Full disclosure = I am a total DLG rookie (minus tossing an eFlite Whip-it around) and just got it to go fly, at first, quietly at the local ball fields. No F3K competitions planned yet but maybe I'll need a challenge in the future. The minimalism of a DLG looks like a huge amount of relaxing fun. Plus - they seem to hold their value pretty well so if I want to sell it down the road (in good shape), I shouldn't lose too much of my investment. Not something I can usually say with my meager fleet these days.
So... I will do my best to document the build. This is also my first build of a glider that is unpowered and needs more attention to detail than the couple Horizon Hobby sailplanes I've had in the past.
Ordered from Hyperflight in the UK on June 5th. A blue/white NRJ with their 'standard' carbon layup (there are also light and strong versions) plus 4 of the recommended servos. They were fast in communication and gave me a tracking number to follow it through local shipping, customs, and through customs in the US. From there, the tracking number went quiet but only a day or so after the last update it arrived on my porch.
I didn't get a picture of the unboxing, but it was well secured in a couple layer thick corrugated cardboard box and all parts were bubble wrapped and taped together spaced to sit in the middle. It arrived safe and sound without a scratch. I'll take some pictures soon with all parts on the scale and post them but I wanted to get the tread started and force myself into good documentation! There are a few build logs out there but most of those know what they're doing so I thought I'd add some rookie experience to the internet.
First impressions are WOW the build quality is really nice. And even though I knew it would be lightweight and tough to package, I'm not sure I realized quite how much lightweight and tough. The receiver and battery I pre-purchased may not both simultaneously go where they need to. The servo tray and servos in all of the instructions I looked up were photographed fairly close so I didn't realize how tiny they are.
Weights -
Fuselage and nosecone - 39 grams
4 KST X08 servos - 35 grams
3D printed servo holder - 5 grams
Turnigy 1S 750 mAh Lipo - 19 grams, though I need to find a smaller one or a longer/thinner one.
Spektrum AR410 4 channel Rx (without plastic case - it won't fit unless it's stripped down) - 3 grams
Horizontal stabilizer - 5 grams
Rudder - 6 grams
Wing - 91 grams
Miscellaneous bag-o-hardware for assembly - 12 grams.
By my math that's 215 grams total minus the little bit of glue I'll need. There are also ballast weights that (I think) are used to help in windier weather but a set for about $50 seemed pretty steep since all it looks like is adhesive wheel weights shrink wrapped to specific lengths of wires. I think that should be easy enough to reproduce for a tenth of the price but I'll cross that bridge when I get to it.
I'll start the build tonight!












")