HilldaFlyer
Well-known member
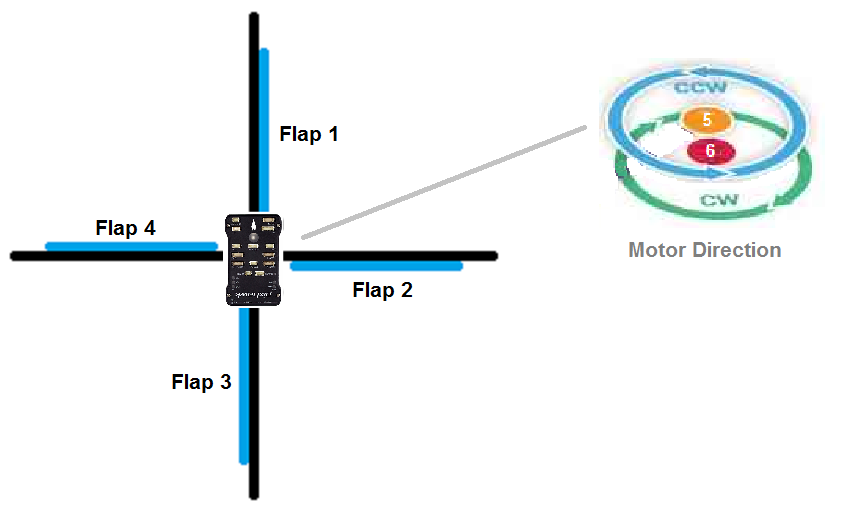
ArduCopter supports a couple of frame designs called SingleCopter and CoaxCopter. Boom! My mind was made up, this looks like the perfect solution.
So I set up a couple of test rigs, one sporting PixRacer board and the other with a Matek F405 Wing board. Both were flashed with ArduCopter and following two weeks of tweeking, I got both functioning (non-flight tested function) as they should.

Here is the Matek F405 Wing setup. The FrSky XSR receiver is in a bag to decrease the range so the Taranis would stop screaming "RSSI Lost" while bench testing.
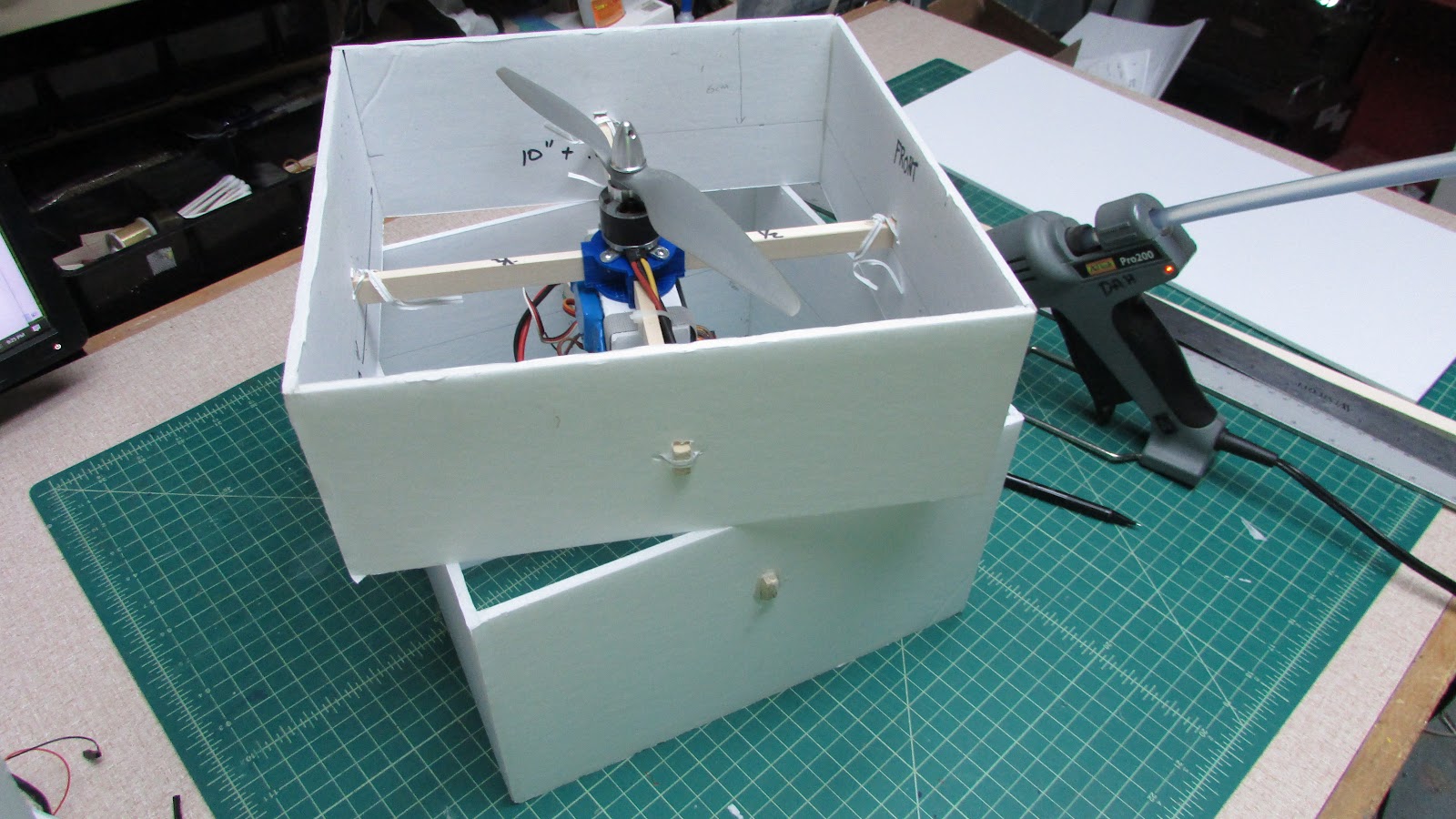
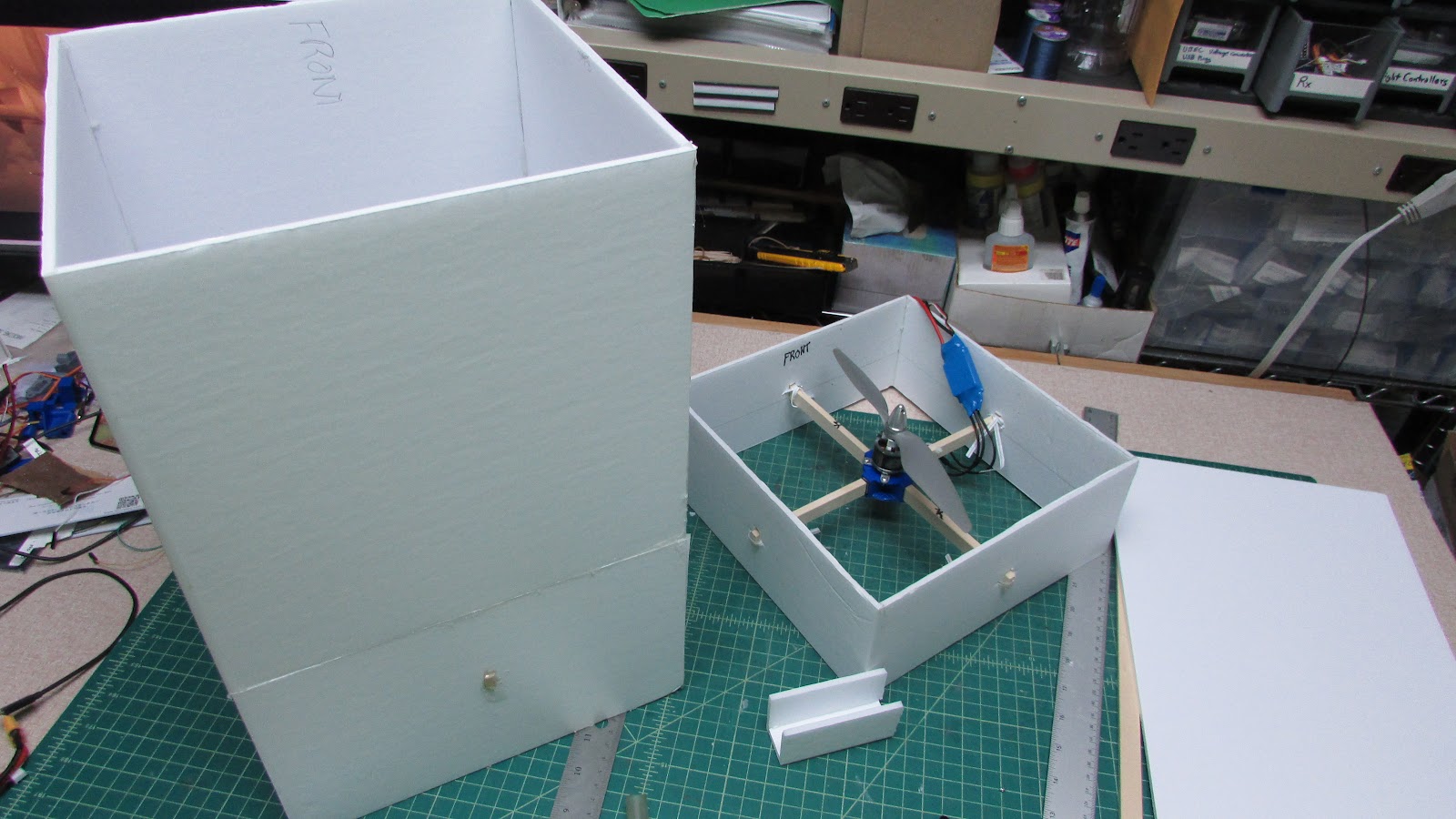
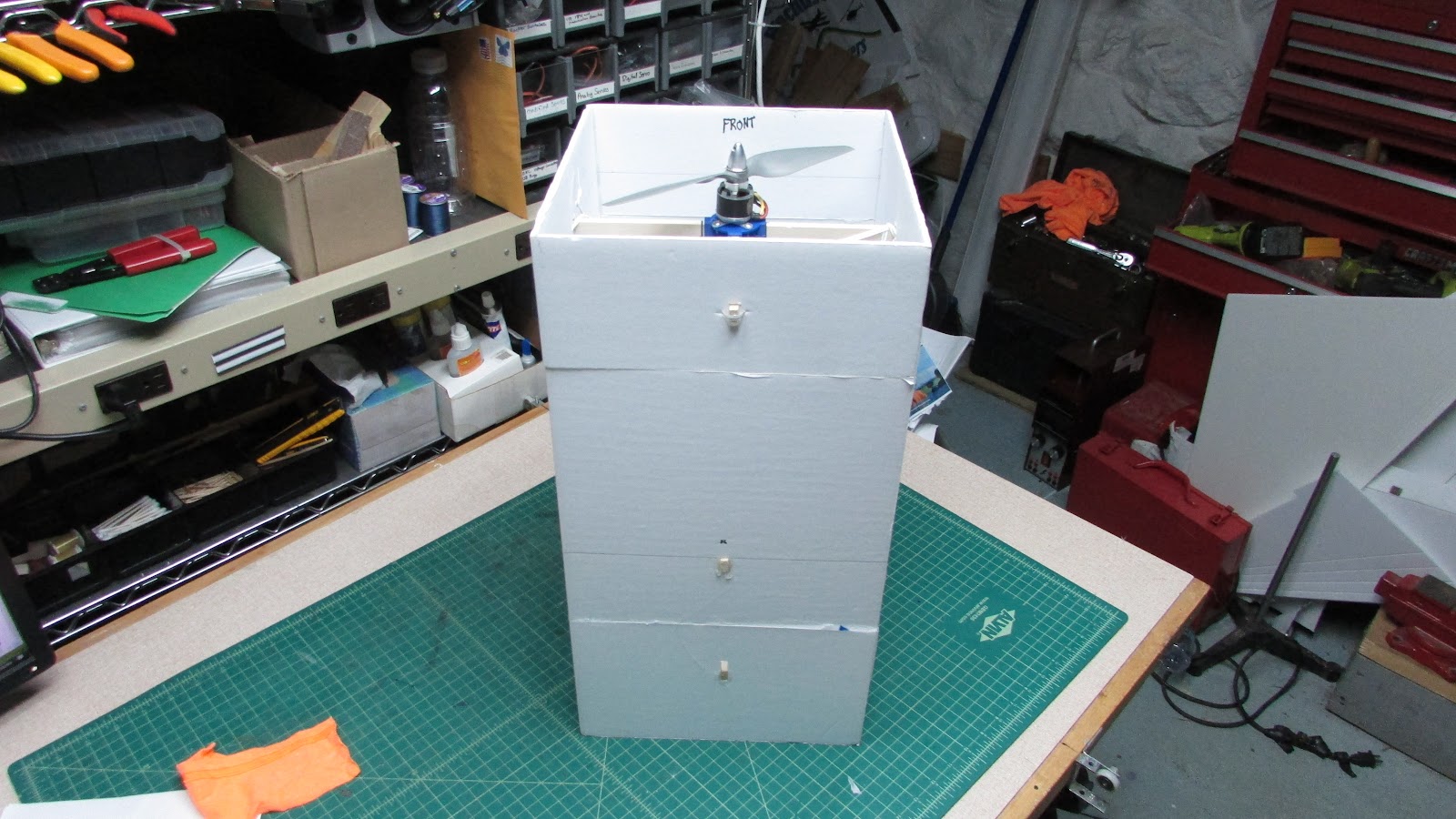
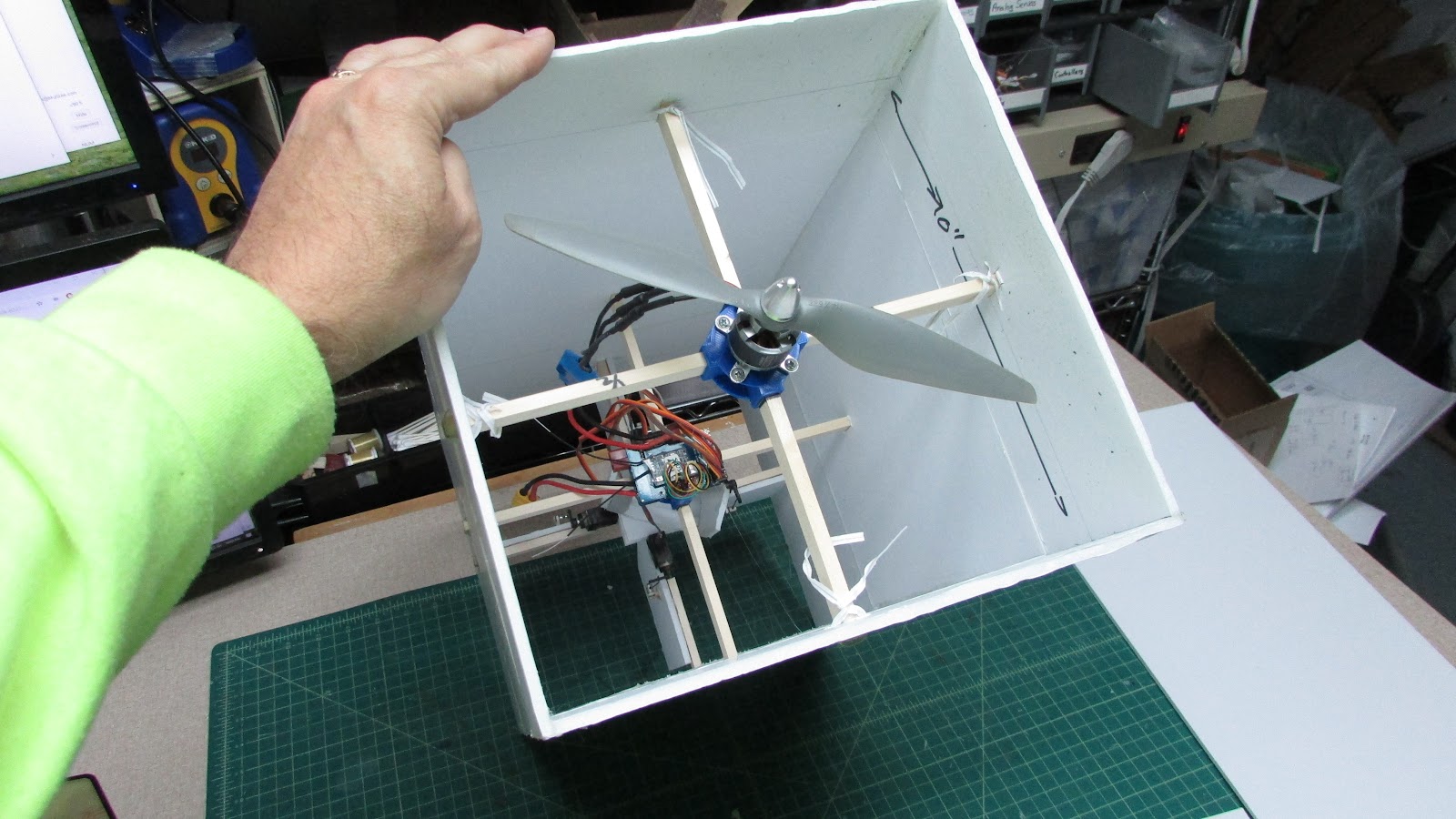
Now that all the control surfaces and motor were "working" it is time for a prototype build.
So I set up a couple of test rigs, one sporting PixRacer board and the other with a Matek F405 Wing board. Both were flashed with ArduCopter and following two weeks of tweeking, I got both functioning (non-flight tested function) as they should.
Here is the Matek F405 Wing setup. The FrSky XSR receiver is in a bag to decrease the range so the Taranis would stop screaming "RSSI Lost" while bench testing.
Now that all the control surfaces and motor were "working" it is time for a prototype build.