D3s0l4ti0n
New member
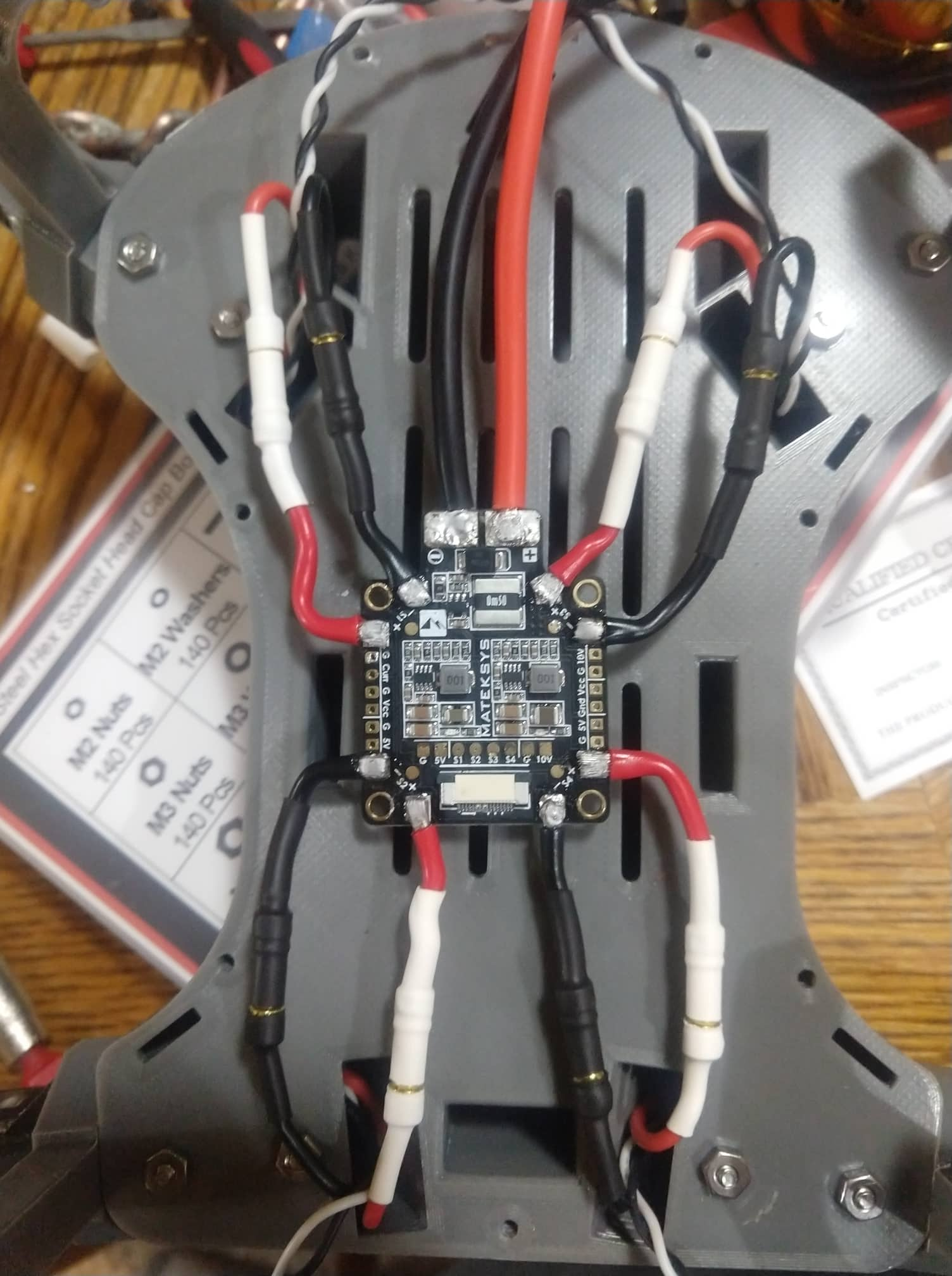
i 3d printed a 10inch prop quadcopter and im having some issues with it wobbling really bad to the point i cant get more that a foot or 2 off the ground and it just wobbles really bad and tries to flip. im going threw everything and making sure everything's tight and re checking that my flight controller is in cog i know the motors are spinning right all connections are good but it just refuses to take off and get in the air and if it does get up it just wants to flip, ive tried tuning the pids a bit and if i raise the p and d gain it gets a bit better and i can get higher but it still just starts wobbling and wants to flip i have a 6 inch fpv racing quad i built with no issues flies great this one thou is giving me lots of problems
Attachments
-
 142044697_459706091855655_3077931677423990687_n.jpg81.3 KB · Views: 0
142044697_459706091855655_3077931677423990687_n.jpg81.3 KB · Views: 0 -
 142290536_842885533201009_5563123115326829453_n.jpg175.2 KB · Views: 0
142290536_842885533201009_5563123115326829453_n.jpg175.2 KB · Views: 0 -
 142349512_832370903998520_7984867726649890103_n.jpg72 KB · Views: 0
142349512_832370903998520_7984867726649890103_n.jpg72 KB · Views: 0 -
 141057032_169689757871376_1093928467805557929_n.jpg80.3 KB · Views: 0
141057032_169689757871376_1093928467805557929_n.jpg80.3 KB · Views: 0 -
 141891126_771149323610852_728393949033527619_n.jpg95.3 KB · Views: 0
141891126_771149323610852_728393949033527619_n.jpg95.3 KB · Views: 0 -
 141873933_459785888726008_4147979426007346288_n.jpg484.2 KB · Views: 0
141873933_459785888726008_4147979426007346288_n.jpg484.2 KB · Views: 0 -
 139447720_700553170656793_4742969602186730529_n.jpg153 KB · Views: 0
139447720_700553170656793_4742969602186730529_n.jpg153 KB · Views: 0 -
 139207298_843829399495121_226919146796633900_n.jpg471.7 KB · Views: 0
139207298_843829399495121_226919146796633900_n.jpg471.7 KB · Views: 0 -
 139380913_786875941909366_5355689996936598246_n (1).jpg194 KB · Views: 0
139380913_786875941909366_5355689996936598246_n (1).jpg194 KB · Views: 0 -
 139187338_154404586257748_4700821071052511794_n (1).jpg291.7 KB · Views: 0
139187338_154404586257748_4700821071052511794_n (1).jpg291.7 KB · Views: 0 -
 146480913_432694798150332_5983204982655907552_n.jpg188.3 KB · Views: 0
146480913_432694798150332_5983204982655907552_n.jpg188.3 KB · Views: 0 -
 IMG_20210130_214154829.jpg1.1 MB · Views: 0
IMG_20210130_214154829.jpg1.1 MB · Views: 0 -
 IMG_20210130_214148519.jpg1.2 MB · Views: 0
IMG_20210130_214148519.jpg1.2 MB · Views: 0 -
 IMG_20210130_214132758.jpg2 MB · Views: 0
IMG_20210130_214132758.jpg2 MB · Views: 0