
Hi Guys,
Im new to the quadcopter, been watching videos.. and got inspired..
 so last week i bought myself a:
so last week i bought myself a:
- Jumper T16 Pro
- Tyro 129
- 4S Lipo
//
Long story made short, out of the box, I'm having issues on getting any stick inputs on betaflight.
- i have bridge the two pads for SBUS, used a piece of wire to make sure.. (i have to work on my soldering.. its been a while )
)
- i have a green on my rx, which means it's bound.
- i can also spin the motors via bf, which means bf can talk to the fc, and the fc can talk to the esc going to the motors.
- im getting rssi feeds on bf (i am assuming that my tx can communicate to my rx and the rx can talk to the fc.,) is that correct?
- but im seeing I2C Error: 2 on betaflight.. what does that mean?
- part of my troubleshooting was to remove the camera, vtx and gps. i also soldered my rx, as i felt that im having loose connections on the plug.
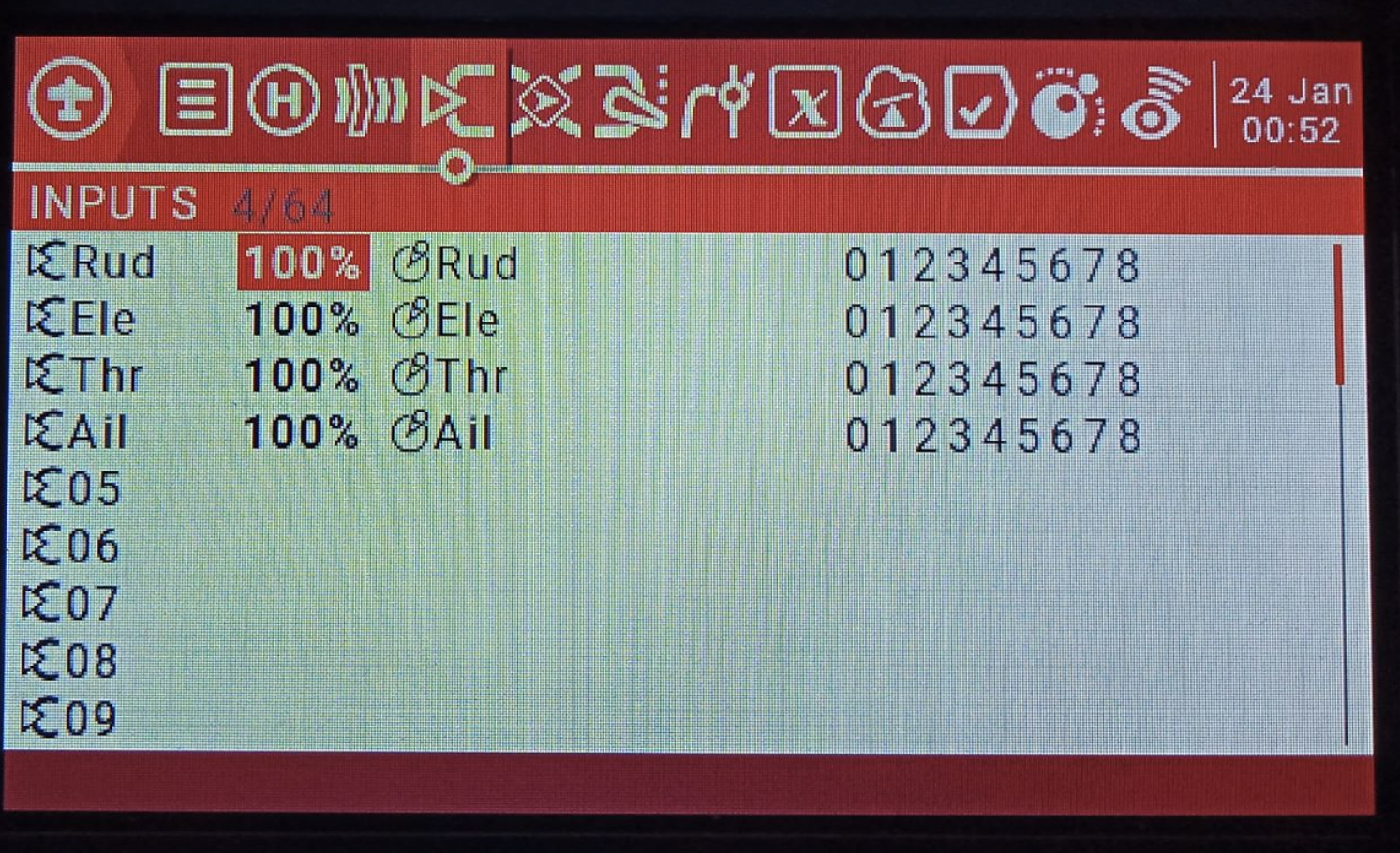
my transmitter is on default setup, i havent setup all the channels yet.. but that shouldn't stop on having stick inputs on bf right?
Thank you very much in advance..
Have a great day everyone!
Im new to the quadcopter, been watching videos.. and got inspired..
- Jumper T16 Pro
- Tyro 129
- 4S Lipo
//
Long story made short, out of the box, I'm having issues on getting any stick inputs on betaflight.
- i have bridge the two pads for SBUS, used a piece of wire to make sure.. (i have to work on my soldering.. its been a while
)- i have a green on my rx, which means it's bound.
- i can also spin the motors via bf, which means bf can talk to the fc, and the fc can talk to the esc going to the motors.
- im getting rssi feeds on bf (i am assuming that my tx can communicate to my rx and the rx can talk to the fc.,) is that correct?
- but im seeing I2C Error: 2 on betaflight.. what does that mean?
- part of my troubleshooting was to remove the camera, vtx and gps. i also soldered my rx, as i felt that im having loose connections on the plug.
my transmitter is on default setup, i havent setup all the channels yet.. but that shouldn't stop on having stick inputs on bf right?
Thank you very much in advance..
Have a great day everyone!
Attachments
-
 jumpert16pro_default_input.png3.1 MB · Views: 0
jumpert16pro_default_input.png3.1 MB · Views: 0 -
 jumpert16pro_default_mixer.png3.5 MB · Views: 0
jumpert16pro_default_mixer.png3.5 MB · Views: 0 -
 jumpert16pro_modelsetup.png2.1 MB · Views: 0
jumpert16pro_modelsetup.png2.1 MB · Views: 0 -
 sbustab.jpg49.3 KB · Views: 0
sbustab.jpg49.3 KB · Views: 0 -
 tyro129_lights.jpg182 KB · Views: 0
tyro129_lights.jpg182 KB · Views: 0 -
 xmdirectsolder.jpg233.3 KB · Views: 0
xmdirectsolder.jpg233.3 KB · Views: 0 -
 81616663_10216623654328809_214984691080495104_o.jpg218.4 KB · Views: 0
81616663_10216623654328809_214984691080495104_o.jpg218.4 KB · Views: 0 -
 82821932_10216623618647917_53304873470394368_o.jpg208.8 KB · Views: 0
82821932_10216623618647917_53304873470394368_o.jpg208.8 KB · Views: 0 -
 83155075_10216623962896523_5238509930905862144_o.jpg177.9 KB · Views: 0
83155075_10216623962896523_5238509930905862144_o.jpg177.9 KB · Views: 0








Last edited: