Woodiie
New member
Hello! I am making a tricopter for a school project, but having some issues.
Once the flight controller is powered, the motors beep it's starting sequence and then simply beeps at a 2s interval with the motor twitching.
The reciever is definietly connected to the FC since when I open Betaflight, the controls work as intended when looking at the reciever section. (They change the correct values).
Using a switch on the controller for motor arming, which works fine as I can see the flags of arming when on the startpage. (Only MPS shows up once ready since it is connected to the FC)
So as far as I can tell, the motors are armed if asking the FC
I have checked that "min max" or whatever it was called, is correct. (The minimum thrust is at 1000 and the arming value is at 1050)
When attempting to callibrate the ESCs by putting the motors on Max in the motors tab(after enabling the safe warning switch), and then connecting the battery, it simply does not respond and keeps beeping. I have tried multiple combos of having the reciever on/off and battery in or out. Basically alp I could think off.
I am running the latest version of Betaflight and I have flashed the FC with the correct version and changed it to the tricopter mode. I have gone through multiple setup steps, I can't recall them all. (Such as switching the FC to ibus reciever mode)
Here are the parts:
Holybro Kakute F4 V2 AIO Flight controller(built in PDB).
This kit of motor and ESC times 3
I will not bother naming the reciever and controller, since I am quite certain that part works fine as previously mentioned.
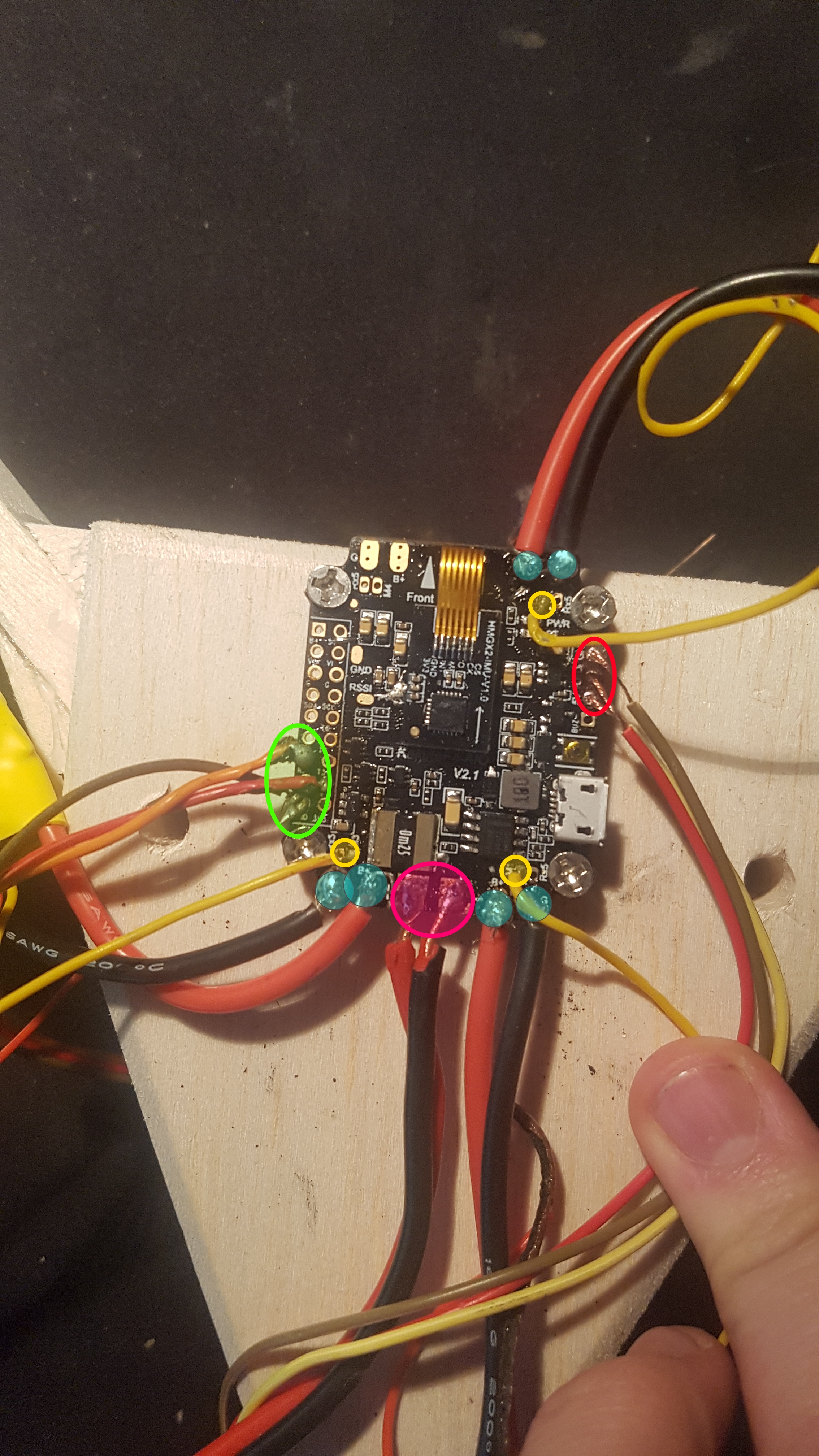
The ESCs are connected to plus and minus and then the yellow data wire is connected to M1. Grounding it did not help.
I have tried multiple configurations on the Motor and ESC wiring to make sure they are aoldered correctly, andI think they are. Yellow in the middle with black and red on the outside with one motor having those two reversed. This also works when just running PWM mode directly from the reciever to the ESC, so those should be correct.
In case you could not tell, I am quite a newbie and after hours of searching and trying out different things, I am just lost for ideas as of what could cause it. At this point, I believe it could be something to do with PIN mapping, since the servo does not work either(unsure if I need to map that up myself, or if changing betaflight config to tricopter was enough).
Thanks for your time! Apologies if there are any spellingor grammar mistakes, writing this on my phone. >.<
Once the flight controller is powered, the motors beep it's starting sequence and then simply beeps at a 2s interval with the motor twitching.
The reciever is definietly connected to the FC since when I open Betaflight, the controls work as intended when looking at the reciever section. (They change the correct values).
Using a switch on the controller for motor arming, which works fine as I can see the flags of arming when on the startpage. (Only MPS shows up once ready since it is connected to the FC)
So as far as I can tell, the motors are armed if asking the FC
I have checked that "min max" or whatever it was called, is correct. (The minimum thrust is at 1000 and the arming value is at 1050)
When attempting to callibrate the ESCs by putting the motors on Max in the motors tab(after enabling the safe warning switch), and then connecting the battery, it simply does not respond and keeps beeping. I have tried multiple combos of having the reciever on/off and battery in or out. Basically alp I could think off.
I am running the latest version of Betaflight and I have flashed the FC with the correct version and changed it to the tricopter mode. I have gone through multiple setup steps, I can't recall them all. (Such as switching the FC to ibus reciever mode)
Here are the parts:
Holybro Kakute F4 V2 AIO Flight controller(built in PDB).
This kit of motor and ESC times 3
I will not bother naming the reciever and controller, since I am quite certain that part works fine as previously mentioned.
The ESCs are connected to plus and minus and then the yellow data wire is connected to M1. Grounding it did not help.
I have tried multiple configurations on the Motor and ESC wiring to make sure they are aoldered correctly, andI think they are. Yellow in the middle with black and red on the outside with one motor having those two reversed. This also works when just running PWM mode directly from the reciever to the ESC, so those should be correct.
In case you could not tell, I am quite a newbie and after hours of searching and trying out different things, I am just lost for ideas as of what could cause it. At this point, I believe it could be something to do with PIN mapping, since the servo does not work either(unsure if I need to map that up myself, or if changing betaflight config to tricopter was enough).
Thanks for your time! Apologies if there are any spellingor grammar mistakes, writing this on my phone. >.<


")