French
Construire Voler S'écraser Répéter
I decided to pick up a FT Dart speedbuild kit as I have lots of spare micro quad parts laying around.
I also decided it would be a good opportunity to try out iNav. Using iNav and a flight controller should allow me to have functions like auto level flight, s.port telemetry, auto launch, and more.
This thread will chronicle the build process.

Parts
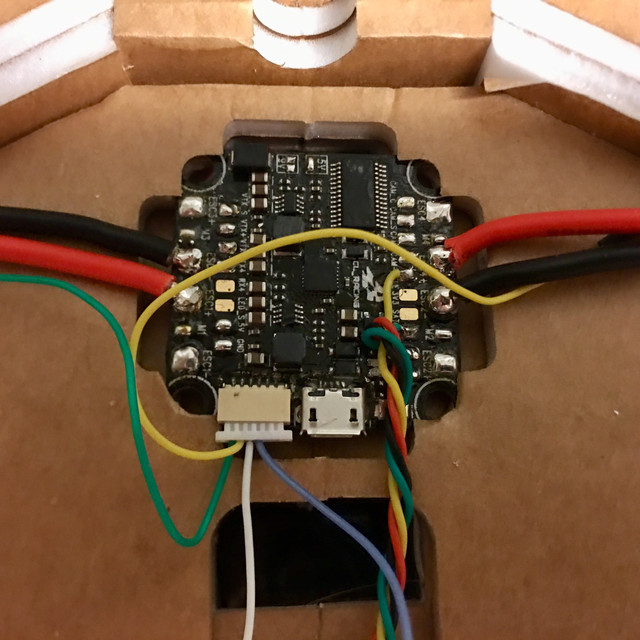
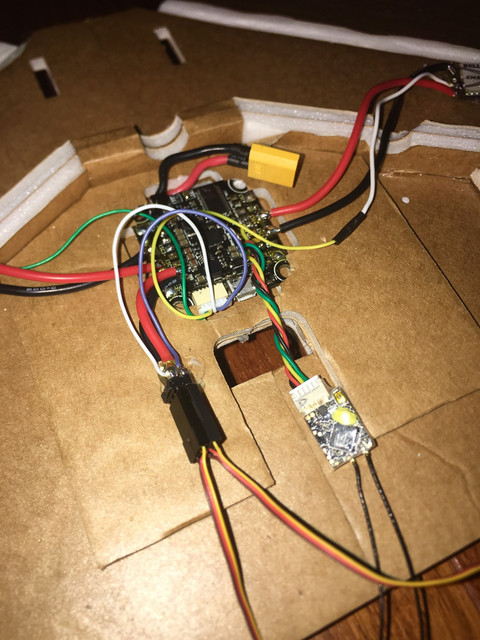
Spare CL Racing F4S flight controller
Spare 1104 6000kv motors from my old Lizard95
Spare emax 30A bullit escs (overkill)
Spare r-xsr
New FT servos
I’ll likely fly it LOS at first, but have a Caddx F1 and AKK Nano 2 (200mw with smart audio) to FPV it.
Lastly, I have a spare GPS I may throw on it (if it lasts that long). Return to home on something this small would be interesting.
Paint
As always, you want to lightly sand the surface of the waterproof foam board to take off the sheen. Remember, we’re only painting the exterior surfaces.

Don’t forget the inside of the wingtips.

Keep the first coat extremely light. I put two coats of white on everything. The white areas got a third coat. The colored areas got two coats of color (four light coats in total).

If you get overspray, like I did on the red nacelle, remove the foam after the last coat and touch-up the white wing for a clean line.

I also decided it would be a good opportunity to try out iNav. Using iNav and a flight controller should allow me to have functions like auto level flight, s.port telemetry, auto launch, and more.
This thread will chronicle the build process.
Parts
Spare CL Racing F4S flight controller
Spare 1104 6000kv motors from my old Lizard95
Spare emax 30A bullit escs (overkill)
Spare r-xsr
New FT servos
I’ll likely fly it LOS at first, but have a Caddx F1 and AKK Nano 2 (200mw with smart audio) to FPV it.
Lastly, I have a spare GPS I may throw on it (if it lasts that long). Return to home on something this small would be interesting.
Paint
As always, you want to lightly sand the surface of the waterproof foam board to take off the sheen. Remember, we’re only painting the exterior surfaces.
Don’t forget the inside of the wingtips.
Keep the first coat extremely light. I put two coats of white on everything. The white areas got a third coat. The colored areas got two coats of color (four light coats in total).
If you get overspray, like I did on the red nacelle, remove the foam after the last coat and touch-up the white wing for a clean line.
Last edited:

")