
SOLVED!!!
Replaced cheap ESC's with slow refresh rate with ESC's that came with SimonK firmware. Now the quad pops into place and overall runs amazingly. 0 wobble with gain set to 75. I'm going to try 100 later today and I'll post results at different settings.
Velotech Magic Multirotor Speed Controller 30A with 2A BEC SimonK Program
See: http://www.buddyrc.com/velotech-mag...ontroller-30a-with-2a-bec-simonk-program.html
Note: These esc's do not come with bullet connectors - you'll need to solder your own on and shrinkwrap them. You'll need 5 sets (3.5 MM Bullet Connectors) (or 5 of whatever you need that's already setup on your build - for me it was 3 males and 2 females) per each speed controller.
Alright so first off, first time poster & this is my first multi-rotor build. I've watched & read just-about every tutorial series I could find when I started this project. What I have is an electrohub body using the KK2.1.5 FC which I've flashed with the Steveis 1.8 firmware.
I've got an issue and have continued to struggle with understanding the self-level gain/limit in correlation with PI P-Gain/P-Limit/I-Gain/I-Limit (roll + pitch (linked) & yaw). I have an issue with oscillation (or a slight wobble) which makes me incredibly nervous to test out flying at higher speeds. I am still a novice pilot however, I am lucky to have started flying on a MCPX2 which gave me a 'crash course' (literally, repaired this thing over 20 times) to flying, period. I can fly this quad without self-level with no problems. The wobble doesn't really happen until I turn on self-level (which I have set to a switch on my transmitter). The wobble is very slight but the more aggressive I am, the more prevalent the wobble is. I have recorded a video that kindof gives an idea of the flight experience. I recorded this at night so to avoid irritating my neighbors with a high-pitch whine, I did this in my garage with closed doors so it was a bit turbulent in there. Regardless, you'll see the wobble occur but you don't really see it as much in this video as it does outside with wind. I was wondering if anyone else has built a similar quad with this flight controller and if they had the same issues. If so, how did you resolve it? Were the ESC's the root of the problem? Is this FC just not that good? Should I not be using the 10"x4.5" props in this configuration? I chose the DJI-style Carbon Nylon props which seem almost indestructible. I adjusted the self-level to the point of losing control (when I set the gain to 65). It rolled left and right at 45 degree angles until I did an emergency landing.. the props hit the dirt and stuck in leaving my quad embedded into the ground at a 80 degree angle. lol!
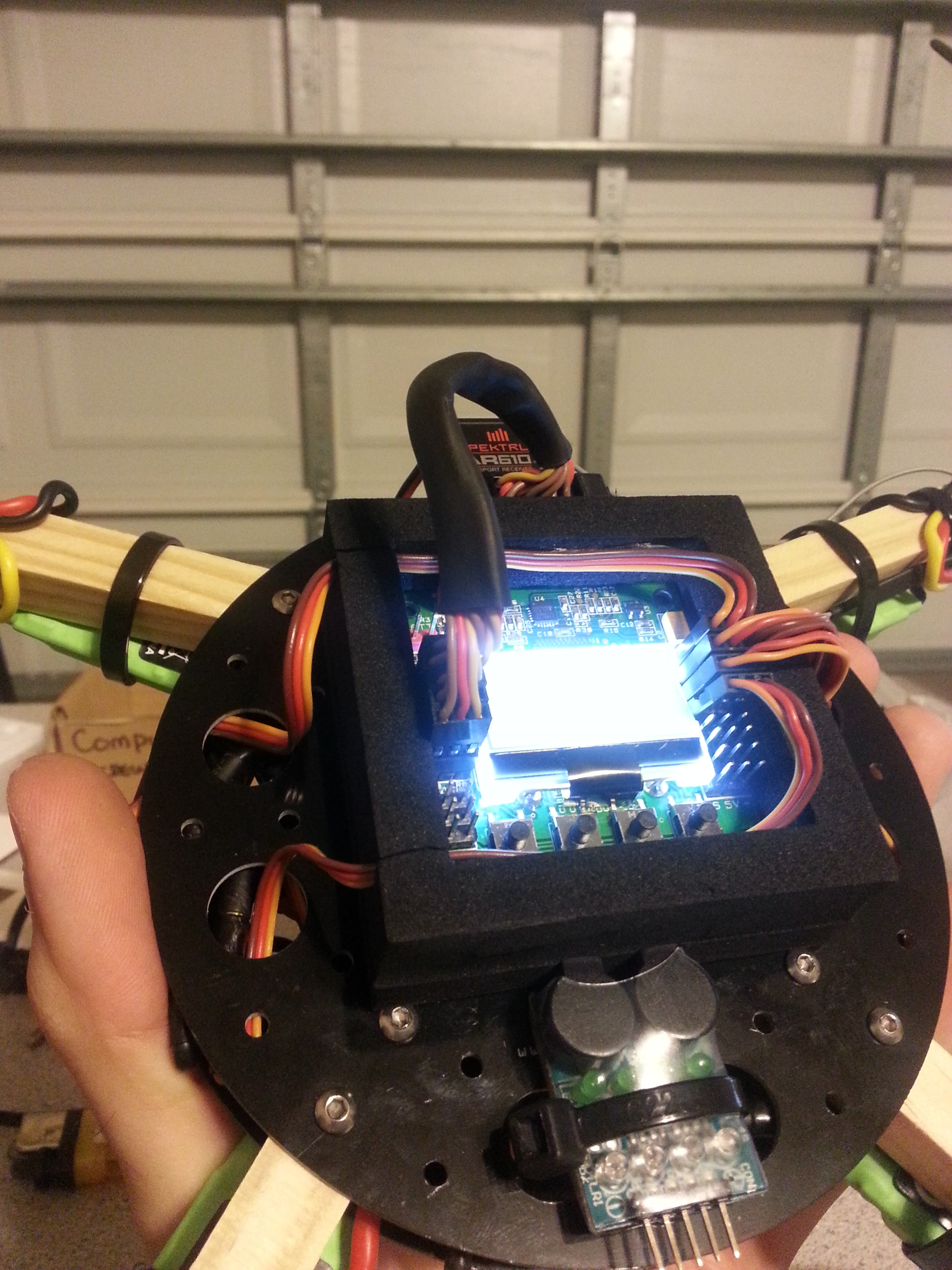
Here's a picture of the body layout that I've got thus far. The flight-controller is hot-glued onto the foam case and the foam case is thoroughly hot-glued onto the top of the electrohub. I used the ACC Bubble tool in the menu to ensure that ACC is 0,0 centered afterwards.
Anyways, this is my build:
Body : ElectroHub Quadcopter Kit
https://store.flitetest.com/electrohub-quadcopter-kit/
Spektrum Receiver : AR610 6-Channel DSMX
http://www.horizonhobby.com/SPMAR61...5&cadevice=c&gclid=CKyqh5_CwMECFcQ-MgodrHUApQ
Flight Controller : Hobbyking KK2.1.5 Multi-rotor LCD Flight Control Board With 6050MPU And Atmel 644PA
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=56269
ESC'S : Turnigy Multistar 20 Amp Multi-rotor Brushless ESC 2-4S
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=47400
Motors : Multistar 2212 - 920KV Multi-Rotor Motor Set w/CW and CCW Threaded Shafts
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=62796
Props : Gemfan Nylon Carbon DJI Style (required with Multistar motors I have) 10x4.5 (Not Slo-Flyer Props)
http://www.helidirect.com/gemfan-ny...ck-props-set-1-cw-and-1-ccw-2-pcs-p-30724.hdx
Battery : Turnigy 2200mAh 3S 30C Lipo Pack
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=14962
Battery Alarm : On Board Lipoly Low Voltage Alarm (2s~4s)
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=41178
Replaced cheap ESC's with slow refresh rate with ESC's that came with SimonK firmware. Now the quad pops into place and overall runs amazingly. 0 wobble with gain set to 75. I'm going to try 100 later today and I'll post results at different settings.
Velotech Magic Multirotor Speed Controller 30A with 2A BEC SimonK Program
See: http://www.buddyrc.com/velotech-mag...ontroller-30a-with-2a-bec-simonk-program.html
Note: These esc's do not come with bullet connectors - you'll need to solder your own on and shrinkwrap them. You'll need 5 sets (3.5 MM Bullet Connectors) (or 5 of whatever you need that's already setup on your build - for me it was 3 males and 2 females) per each speed controller.
Alright so first off, first time poster & this is my first multi-rotor build. I've watched & read just-about every tutorial series I could find when I started this project. What I have is an electrohub body using the KK2.1.5 FC which I've flashed with the Steveis 1.8 firmware.
I've got an issue and have continued to struggle with understanding the self-level gain/limit in correlation with PI P-Gain/P-Limit/I-Gain/I-Limit (roll + pitch (linked) & yaw). I have an issue with oscillation (or a slight wobble) which makes me incredibly nervous to test out flying at higher speeds. I am still a novice pilot however, I am lucky to have started flying on a MCPX2 which gave me a 'crash course' (literally, repaired this thing over 20 times) to flying, period. I can fly this quad without self-level with no problems. The wobble doesn't really happen until I turn on self-level (which I have set to a switch on my transmitter). The wobble is very slight but the more aggressive I am, the more prevalent the wobble is. I have recorded a video that kindof gives an idea of the flight experience. I recorded this at night so to avoid irritating my neighbors with a high-pitch whine, I did this in my garage with closed doors so it was a bit turbulent in there. Regardless, you'll see the wobble occur but you don't really see it as much in this video as it does outside with wind. I was wondering if anyone else has built a similar quad with this flight controller and if they had the same issues. If so, how did you resolve it? Were the ESC's the root of the problem? Is this FC just not that good? Should I not be using the 10"x4.5" props in this configuration? I chose the DJI-style Carbon Nylon props which seem almost indestructible. I adjusted the self-level to the point of losing control (when I set the gain to 65). It rolled left and right at 45 degree angles until I did an emergency landing.. the props hit the dirt and stuck in leaving my quad embedded into the ground at a 80 degree angle. lol!
Here's a picture of the body layout that I've got thus far. The flight-controller is hot-glued onto the foam case and the foam case is thoroughly hot-glued onto the top of the electrohub. I used the ACC Bubble tool in the menu to ensure that ACC is 0,0 centered afterwards.
Anyways, this is my build:
Body : ElectroHub Quadcopter Kit
https://store.flitetest.com/electrohub-quadcopter-kit/
Spektrum Receiver : AR610 6-Channel DSMX
http://www.horizonhobby.com/SPMAR61...5&cadevice=c&gclid=CKyqh5_CwMECFcQ-MgodrHUApQ
Flight Controller : Hobbyking KK2.1.5 Multi-rotor LCD Flight Control Board With 6050MPU And Atmel 644PA
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=56269
ESC'S : Turnigy Multistar 20 Amp Multi-rotor Brushless ESC 2-4S
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=47400
Motors : Multistar 2212 - 920KV Multi-Rotor Motor Set w/CW and CCW Threaded Shafts
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=62796
Props : Gemfan Nylon Carbon DJI Style (required with Multistar motors I have) 10x4.5 (Not Slo-Flyer Props)
http://www.helidirect.com/gemfan-ny...ck-props-set-1-cw-and-1-ccw-2-pcs-p-30724.hdx
Battery : Turnigy 2200mAh 3S 30C Lipo Pack
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=14962
Battery Alarm : On Board Lipoly Low Voltage Alarm (2s~4s)
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=41178
Last edited:
")