Hi Guys,
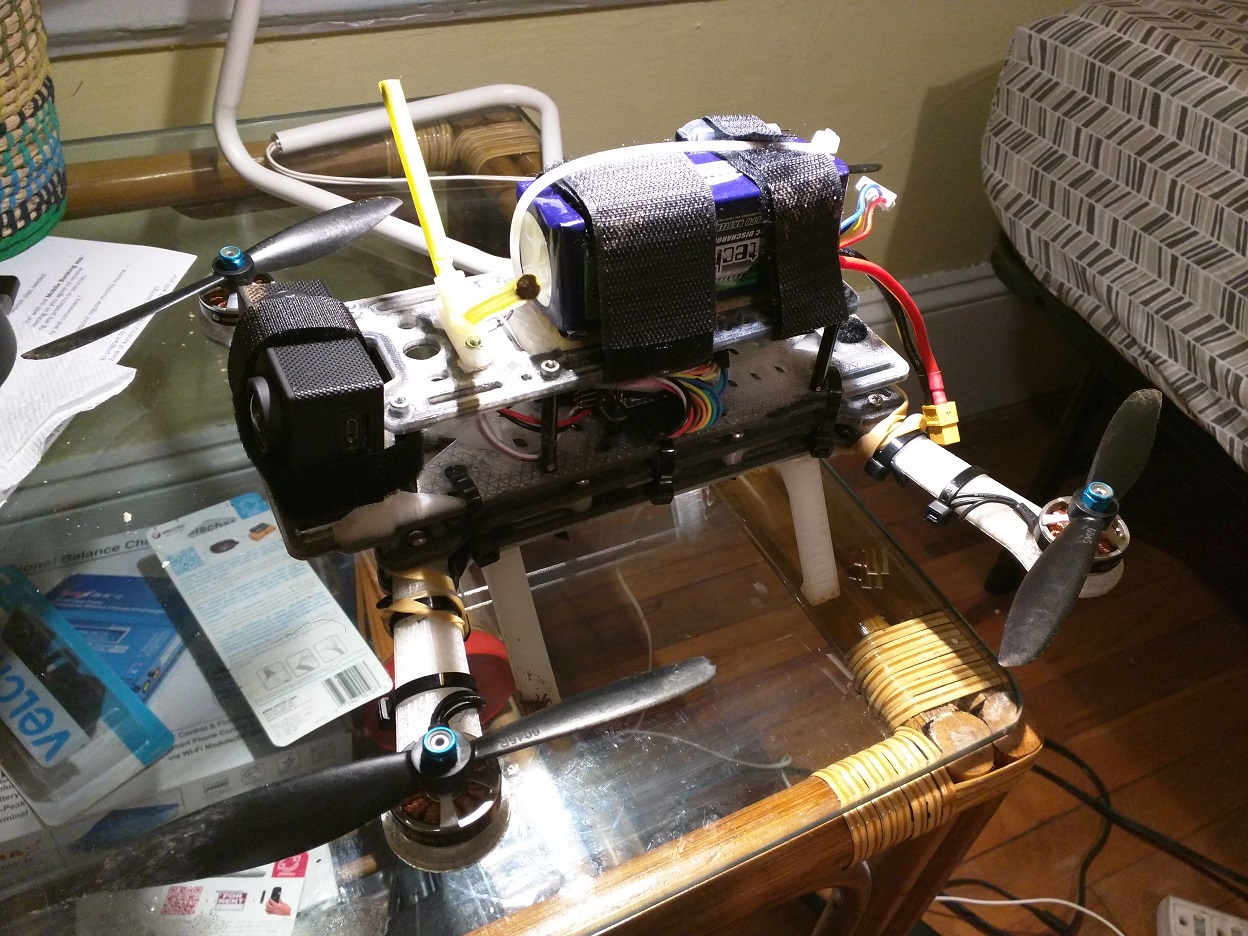
Newbie here! I made the Hovership MHQ2 racing quad, but I'm having issues controlling it. First of all, here's the complete gear that I'm using:
Quad body printed using the Markforged Mark One printer
Naze32 Rev6 FC
Turnigy TGY-i6 transmitter and receiver
Hovership H-12A ESCs
H2204X 1960kv Brushless Motors
6x4.5 Propellers
I set up the Naze32 using Baseflight (I don't think cleanflight supports the Naze32 Rev6 yet, does it?).
I am using the default PIDs and setup parameters. Here are some of the values from Baseflight CLI tab:
looptime = 2500
emf_avoidance = 0
midrc = 1500
minthrottle = 1150
maxthrottle = 1850
mincommand = 1000
mincheck = 1100
maxcheck = 1900
All the end points are set to 100% on the transmitter.
Images of the setup are attached.
I tried flying earlier today and found a strange issue. Doesn't matter which direction I keep the quad in, it rotated to a particular direction on its own as soon as it took off. Rotating it towards the left side wasn't really working, even with the stick on the extreme left, it was having a hard time to even move slightly. But rotation on the right side was going crazy even with the slightest movement of the control stick. Trimming the yaw rate didn't really help, tried that.
Within seconds of taking off, I was losing control over the quad and it'd crash. I tried multiple times, but the same issue occurred every time.
What am I doing wrong? Please help!
Thank you!
Newbie here! I made the Hovership MHQ2 racing quad, but I'm having issues controlling it. First of all, here's the complete gear that I'm using:
Quad body printed using the Markforged Mark One printer
Naze32 Rev6 FC
Turnigy TGY-i6 transmitter and receiver
Hovership H-12A ESCs
H2204X 1960kv Brushless Motors
6x4.5 Propellers
I set up the Naze32 using Baseflight (I don't think cleanflight supports the Naze32 Rev6 yet, does it?).
I am using the default PIDs and setup parameters. Here are some of the values from Baseflight CLI tab:
looptime = 2500
emf_avoidance = 0
midrc = 1500
minthrottle = 1150
maxthrottle = 1850
mincommand = 1000
mincheck = 1100
maxcheck = 1900
All the end points are set to 100% on the transmitter.
Images of the setup are attached.
I tried flying earlier today and found a strange issue. Doesn't matter which direction I keep the quad in, it rotated to a particular direction on its own as soon as it took off. Rotating it towards the left side wasn't really working, even with the stick on the extreme left, it was having a hard time to even move slightly. But rotation on the right side was going crazy even with the slightest movement of the control stick. Trimming the yaw rate didn't really help, tried that.
Within seconds of taking off, I was losing control over the quad and it'd crash. I tried multiple times, but the same issue occurred every time.
What am I doing wrong? Please help!
Thank you!