Hi everyone,
I have problem with a drone that crashed every time ive tried to use it the last 1,5 years. This is Very disencuraging and after trying to google the solution it seems i cant figure it out so i come here searching for the collective visedom in this community.
It seems to me the problem is an overcorrection in roll axis that sends the drone up to the clouds even with a very small amount of throttle.
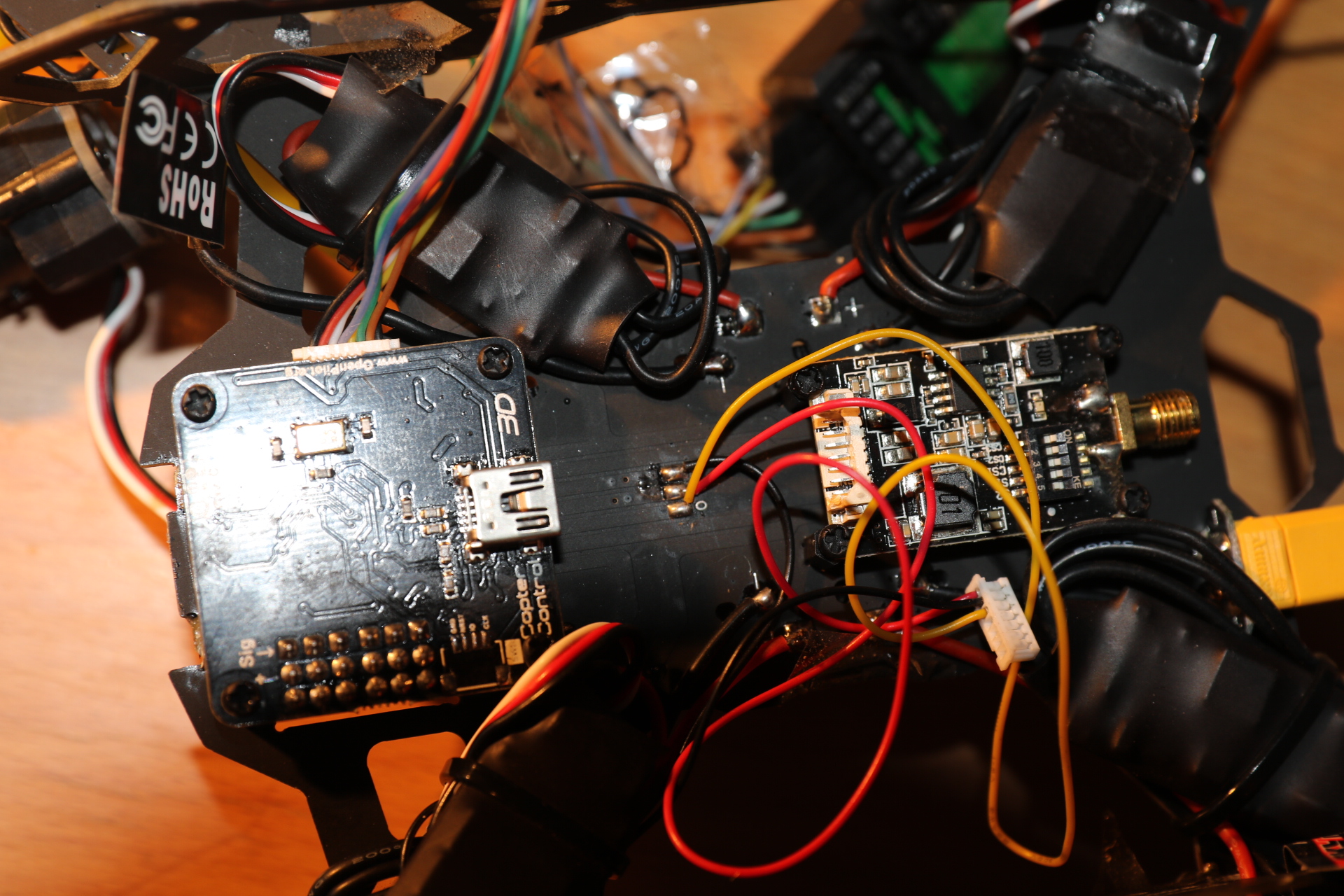
The drone is a Tarot 200 class.
Are the setting way off?
Should I put something inbetween the frame and the CC3D-board to dampen?
pleas advice
best regards Darkwing

I have problem with a drone that crashed every time ive tried to use it the last 1,5 years. This is Very disencuraging and after trying to google the solution it seems i cant figure it out so i come here searching for the collective visedom in this community.
It seems to me the problem is an overcorrection in roll axis that sends the drone up to the clouds even with a very small amount of throttle.
The drone is a Tarot 200 class.
Are the setting way off?
Should I put something inbetween the frame and the CC3D-board to dampen?
pleas advice
best regards Darkwing

")