
DDSFlyer
Senior Member
So here's how far I got tonight. Fully built bat bone frame with booms. Tail assembly put together and mounted motor directly to the motor mount (Crafty Dan - can you zip tie mount these 2826-1200kV motors somehow? I couldn't figure a way so I directly screwed into the motor mount. Dunno how it'll do with the front straight mounts, I'll know when I get them in the mail). ESC's approximated on the booms with zip ties. FT Camera mount mounted to the bat bone frame.
Some pics for reference follow.
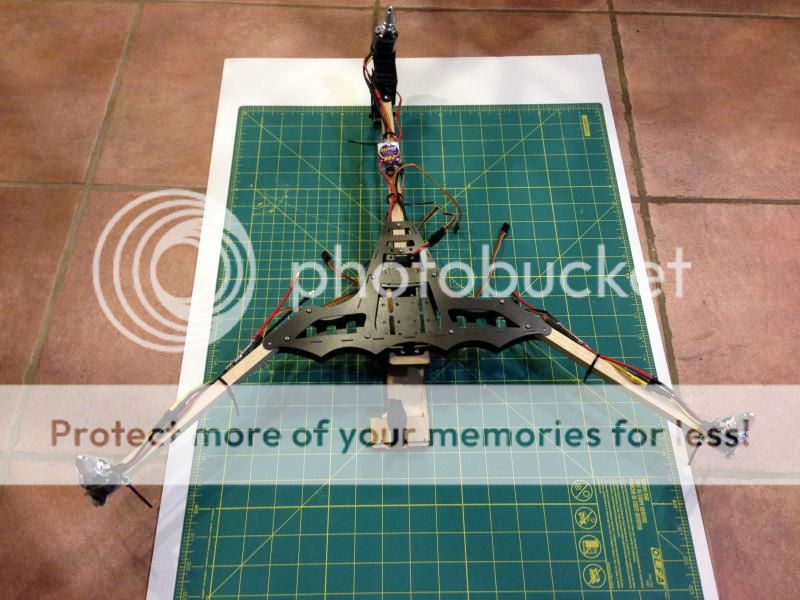
Overall view

Tail mount view with directly mounted motor

FT camera mount

Close up of the back mount. I used one of the longer screws with the camera mount kit to go through the boom and into the mount, then used the rest for the two front holes. Instead of 4 screws it is now 3. Only thing I wish was that I had shorter screws, but hey I can always grind them off with the dremel

Here's the front mount. The inner holes lined up with the Bat Bone frame instead of the outer ones that are set a little farther back. It doesn't fit as well as I'd hoped because I put WAY too much tension in the wires (which David or someone else at FT made even though David said he wouldn't prebend those wires....hehe). Second picture shows how the back of the wood is trying to separate because there is so much tension and the screws aren't centered on the wood and are a little farther forward. It's tiny and I don't know if it'll matter, just bugged me since it didn't look that way before when I put it together with the other holes before I mounted it to the bat bone.

Anyways, that's where I left her for the night. Next up is measuring out wires for the breakout cable, soldering that up, mounting the KK2.0 board and Orange Rx and connecting them together, and countless other things...slowly but surely
Some pics for reference follow.

Overall view

Tail mount view with directly mounted motor

FT camera mount

Close up of the back mount. I used one of the longer screws with the camera mount kit to go through the boom and into the mount, then used the rest for the two front holes. Instead of 4 screws it is now 3. Only thing I wish was that I had shorter screws, but hey I can always grind them off with the dremel

Here's the front mount. The inner holes lined up with the Bat Bone frame instead of the outer ones that are set a little farther back. It doesn't fit as well as I'd hoped because I put WAY too much tension in the wires (which David or someone else at FT made even though David said he wouldn't prebend those wires....hehe). Second picture shows how the back of the wood is trying to separate because there is so much tension and the screws aren't centered on the wood and are a little farther forward. It's tiny and I don't know if it'll matter, just bugged me since it didn't look that way before when I put it together with the other holes before I mounted it to the bat bone.

Anyways, that's where I left her for the night. Next up is measuring out wires for the breakout cable, soldering that up, mounting the KK2.0 board and Orange Rx and connecting them together, and countless other things...slowly but surely





