Mastrmindz
New member
Hey FT.
I have a problem and I am hoping you can help me out. (I am not sure this is the right forum topic for this issue, but it is slightly related to customer support).
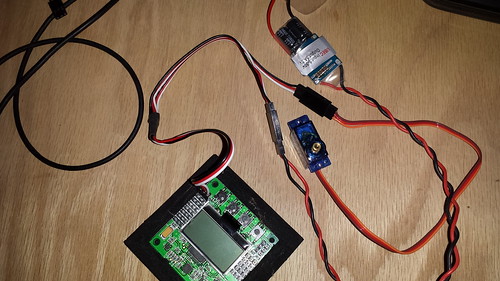
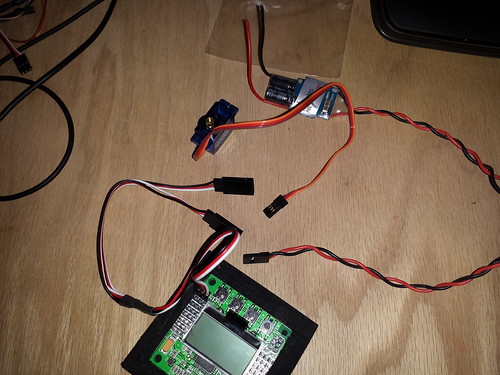
I have been in the hobby for a few months now. Back in late May, I had to replace my KK 2.1 board and decided to go with the Flip 1.5 board from RTF Quads under the recommendation of the Flite Test team and many others on the interwebs. I got the board in June and was really excited to install it on my Rotorbones tricopter. Everything worked except the tail servo.
After roaming the forums, I found that the general consensus was that not enough power was delivered to the servo from the FC. I tried to get in contact with Witespy and he eventually replied. After a few emails back and forth, he said that he would send me some schematics for the power distribution involving a UBEC. After a few months, I still not have received that schematic. I have sent him multiple emails and have not heard back from him.
I am very disappointed in the product so far. I have tried everything to get the tail servo working and tried connecting the UBEC in multiple ways, burning out several servos in the process. I had a friend come and look at it and he said that there might be something wrong with the code. I would not understand why that would be the case since I ordered mine flashed for a tricopter.
Since you, the FT team, are personal friends with Paul Baxter and are working with him on a few projects, I am hoping you can help me with a solution to this problem. I mainly bought the Flip 1.5 because of your suggestion. I do not want to fully discredit RTF Quads' products. I seem to be one of only a few people to have this problem. If you can help me get in contact with Paul or recommend another one of his products that will for sure work with my tricopter and is still under that $40 price range, I would really appreciate it.
Thanks!
Mastrmindz
P.S. Your show is the BOMB! Love it!
I have a problem and I am hoping you can help me out. (I am not sure this is the right forum topic for this issue, but it is slightly related to customer support).
I have been in the hobby for a few months now. Back in late May, I had to replace my KK 2.1 board and decided to go with the Flip 1.5 board from RTF Quads under the recommendation of the Flite Test team and many others on the interwebs. I got the board in June and was really excited to install it on my Rotorbones tricopter. Everything worked except the tail servo.
After roaming the forums, I found that the general consensus was that not enough power was delivered to the servo from the FC. I tried to get in contact with Witespy and he eventually replied. After a few emails back and forth, he said that he would send me some schematics for the power distribution involving a UBEC. After a few months, I still not have received that schematic. I have sent him multiple emails and have not heard back from him.
I am very disappointed in the product so far. I have tried everything to get the tail servo working and tried connecting the UBEC in multiple ways, burning out several servos in the process. I had a friend come and look at it and he said that there might be something wrong with the code. I would not understand why that would be the case since I ordered mine flashed for a tricopter.
Since you, the FT team, are personal friends with Paul Baxter and are working with him on a few projects, I am hoping you can help me with a solution to this problem. I mainly bought the Flip 1.5 because of your suggestion. I do not want to fully discredit RTF Quads' products. I seem to be one of only a few people to have this problem. If you can help me get in contact with Paul or recommend another one of his products that will for sure work with my tricopter and is still under that $40 price range, I would really appreciate it.
Thanks!
Mastrmindz
P.S. Your show is the BOMB! Love it!
Last edited: