FlyerMorph
Junior Member
Hey guys!
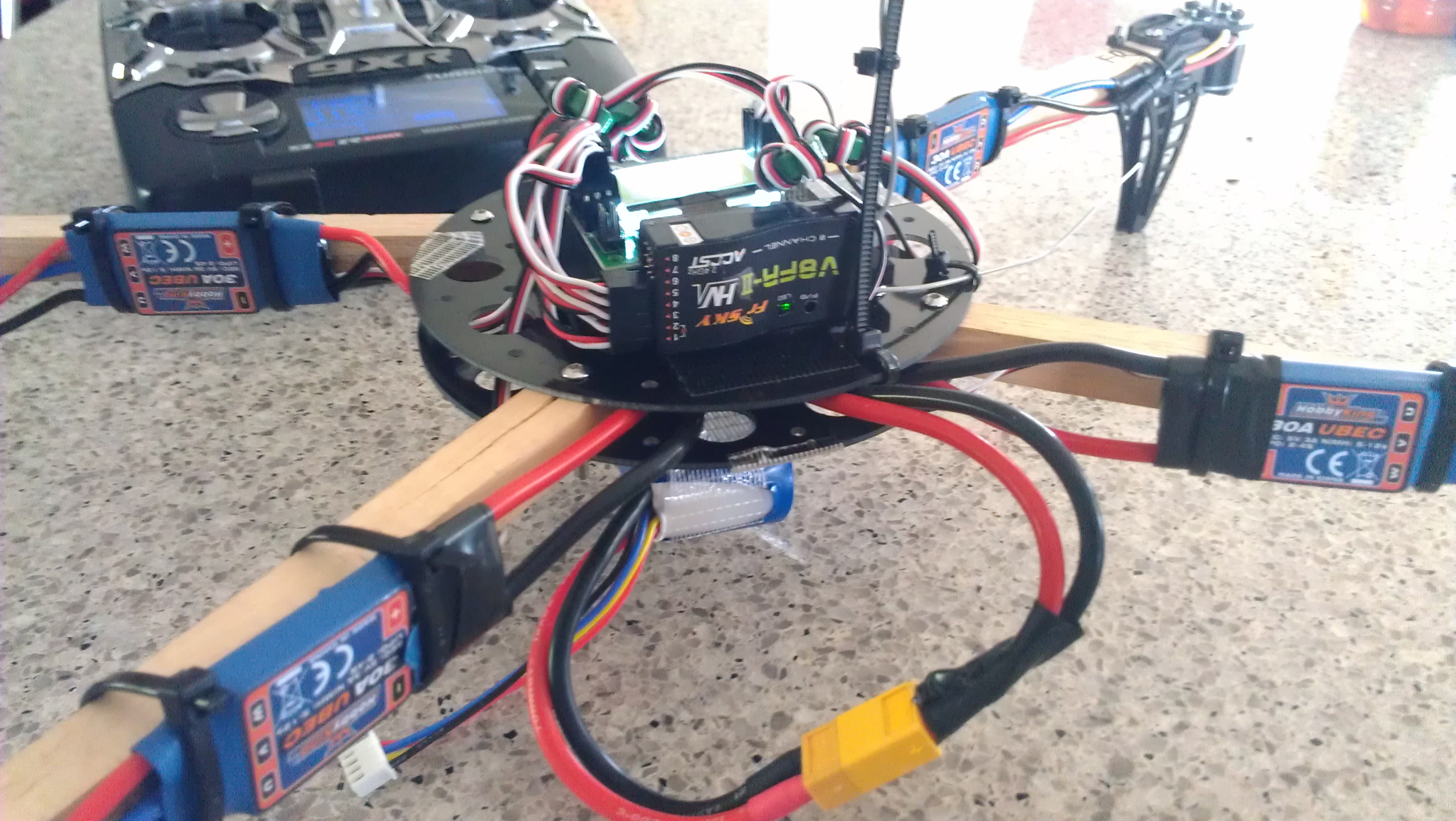
So my dad and I just built our first quadcopter (Electrohub quad kit with the KK2.1.5 board, generic HK 30a esc's NTM Prop Drive motors) and we took it for a test flight yesterday afternoon. When we tried to put a bit of power and started increasing throttle to the quad, it suddenly flipped really fast to one side and broke on of the booms (so much for the wood being basically as good as carbon fibre, Alex ). Anyways so we tried it again and it flipped again. So we factory reset the board and went through the settings and redialed them in and recalibrated the gyros. When we went in the "Sensor Test" after we callibrated, we noticed the numbers on most axis of both the gyro and the accelerometer when jumping around in about a 10 digit "radius" (i.e. the number jumped around within about five numbers up and five numbers down). So we decided to do some testing. I held the quad in my hands, arms outstretched and my dad increased the throttle very slowly. Quickly I realised that the quad was pulling different ways. So it would start trying to flip left and then right then suddenly a huge burst of power from the right side forced it to twist in my hands. Luckily my father was quick to turn off the motors. After some extensive testing back at home, I have noticed that whichever motor I have plugged into the no. 3 motor slot on the board, after I have increased throttle fractionally, starts slowly spinning up faster than the other motors. While this is happening, all other motors are decreasing and increasing in throttle slightly. The when I picked up the quad and tipped it to the left. The left motors decreased throttle, the opposite of what it was supposed to do. Also as I dropped the right side, the right motors lost throttle, again the opposite of what they are supposed to do.
). Anyways so we tried it again and it flipped again. So we factory reset the board and went through the settings and redialed them in and recalibrated the gyros. When we went in the "Sensor Test" after we callibrated, we noticed the numbers on most axis of both the gyro and the accelerometer when jumping around in about a 10 digit "radius" (i.e. the number jumped around within about five numbers up and five numbers down). So we decided to do some testing. I held the quad in my hands, arms outstretched and my dad increased the throttle very slowly. Quickly I realised that the quad was pulling different ways. So it would start trying to flip left and then right then suddenly a huge burst of power from the right side forced it to twist in my hands. Luckily my father was quick to turn off the motors. After some extensive testing back at home, I have noticed that whichever motor I have plugged into the no. 3 motor slot on the board, after I have increased throttle fractionally, starts slowly spinning up faster than the other motors. While this is happening, all other motors are decreasing and increasing in throttle slightly. The when I picked up the quad and tipped it to the left. The left motors decreased throttle, the opposite of what it was supposed to do. Also as I dropped the right side, the right motors lost throttle, again the opposite of what they are supposed to do.
After researching extensively I can't find anything on this problem. So please if anyone holds any special knowledge on this please advise me of what is going wrong.
Thank you to anyone who read the entire thing and considered helping out
So my dad and I just built our first quadcopter (Electrohub quad kit with the KK2.1.5 board, generic HK 30a esc's NTM Prop Drive motors) and we took it for a test flight yesterday afternoon. When we tried to put a bit of power and started increasing throttle to the quad, it suddenly flipped really fast to one side and broke on of the booms (so much for the wood being basically as good as carbon fibre, Alex
). Anyways so we tried it again and it flipped again. So we factory reset the board and went through the settings and redialed them in and recalibrated the gyros. When we went in the "Sensor Test" after we callibrated, we noticed the numbers on most axis of both the gyro and the accelerometer when jumping around in about a 10 digit "radius" (i.e. the number jumped around within about five numbers up and five numbers down). So we decided to do some testing. I held the quad in my hands, arms outstretched and my dad increased the throttle very slowly. Quickly I realised that the quad was pulling different ways. So it would start trying to flip left and then right then suddenly a huge burst of power from the right side forced it to twist in my hands. Luckily my father was quick to turn off the motors. After some extensive testing back at home, I have noticed that whichever motor I have plugged into the no. 3 motor slot on the board, after I have increased throttle fractionally, starts slowly spinning up faster than the other motors. While this is happening, all other motors are decreasing and increasing in throttle slightly. The when I picked up the quad and tipped it to the left. The left motors decreased throttle, the opposite of what it was supposed to do. Also as I dropped the right side, the right motors lost throttle, again the opposite of what they are supposed to do. After researching extensively I can't find anything on this problem. So please if anyone holds any special knowledge on this please advise me of what is going wrong.
Thank you to anyone who read the entire thing and considered helping out
Last edited: