Beaver5150
Active member
I'm new here, but Ive been on other forums and in the hobby for over 10 years. This is my 3rd Multi-rotor build in a few months, each one morphing into the next.
This one isn't pure scratch, but made from an Eachine tilt rotor 180 frame and parts of a wrecked MSH Mini Protos 450 heli and are spliced together at the mid section. The motor mounts are from a Tarot Ironman 450 quad, and the landing skids are MSH.
Electronics consist of AR6200 Diversity 6ch Rx, an older Illuminati32 (Naze32/F103) controller on Betaflight, Castle 25A ESCs, 2- T-Motor 1806/2300kv motors up front on the steering arms, and a single 2206/2300kv on the tail, Gemfan 6042 x 3 props. . Steering and "bomb/cargo release" servos are F.T. ES08AII. I plan to upgrade to 25mm or 28mm motors and 7 inch props soon.
Programming the controller was a pain as I'm new to Betaflight, and the default configuration profiles wont automatically assign the proper servo outputs. I had to research and enter the proper CLI commands to get it working.
The Stinger started as an experiment, but after putting a few flights on it, I've decided to keep this one for awhile. It flies like a mix of helicopter and a quad, with a little airplane thrown in there somewhere. I have nearly 2 solid hours of flight time on it now, 5 minutes per flight on a 3S/3600mAh/50C pack, which isn't bad considering the 800g flying weight.... and that's 5 minutes of fast flying, not just hovering around. The front steering works perfectly, no yaw problems whatsoever.
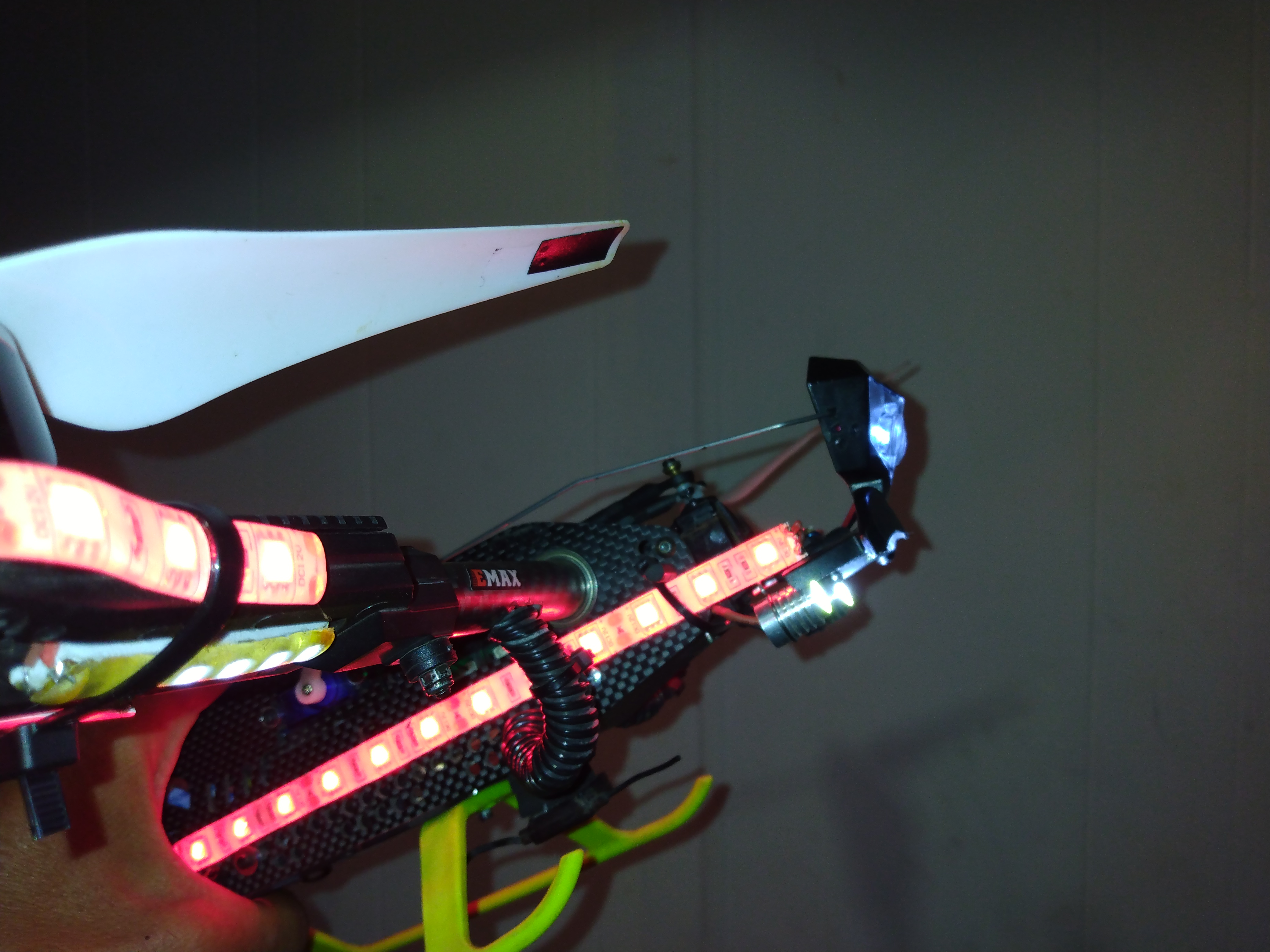
The LEDs are generic 12V strips and are necessary as I do most of my flying after dark due to my work schedule. This tricopter is a blast to fly at night, ripping around looking like a small UFO!
Well, there it is. I'm including pics now, and will have video soon. Questions are welcome.










This one isn't pure scratch, but made from an Eachine tilt rotor 180 frame and parts of a wrecked MSH Mini Protos 450 heli and are spliced together at the mid section. The motor mounts are from a Tarot Ironman 450 quad, and the landing skids are MSH.
Electronics consist of AR6200 Diversity 6ch Rx, an older Illuminati32 (Naze32/F103) controller on Betaflight, Castle 25A ESCs, 2- T-Motor 1806/2300kv motors up front on the steering arms, and a single 2206/2300kv on the tail, Gemfan 6042 x 3 props. . Steering and "bomb/cargo release" servos are F.T. ES08AII. I plan to upgrade to 25mm or 28mm motors and 7 inch props soon.
Programming the controller was a pain as I'm new to Betaflight, and the default configuration profiles wont automatically assign the proper servo outputs. I had to research and enter the proper CLI commands to get it working.
The Stinger started as an experiment, but after putting a few flights on it, I've decided to keep this one for awhile. It flies like a mix of helicopter and a quad, with a little airplane thrown in there somewhere. I have nearly 2 solid hours of flight time on it now, 5 minutes per flight on a 3S/3600mAh/50C pack, which isn't bad considering the 800g flying weight.... and that's 5 minutes of fast flying, not just hovering around. The front steering works perfectly, no yaw problems whatsoever.
The LEDs are generic 12V strips and are necessary as I do most of my flying after dark due to my work schedule. This tricopter is a blast to fly at night, ripping around looking like a small UFO!
Well, there it is. I'm including pics now, and will have video soon. Questions are welcome.










![20220303_014653[1].jpg](https://ftforumx2.s3.amazonaws.com/2022/03/407641_a15543b5ceb43d247fadde1bd40b82cd.jpg)