Stefs Engineering
Member
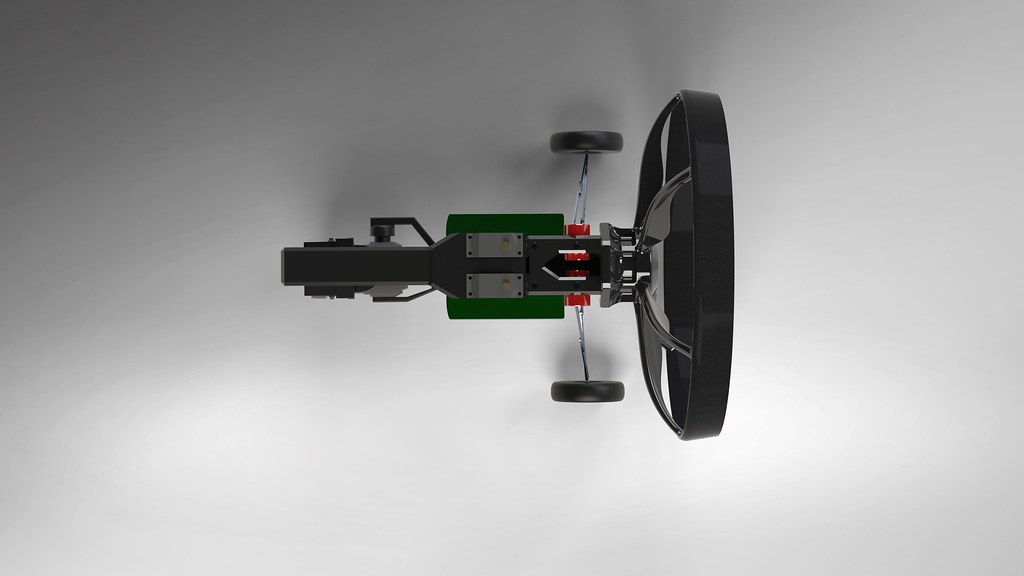
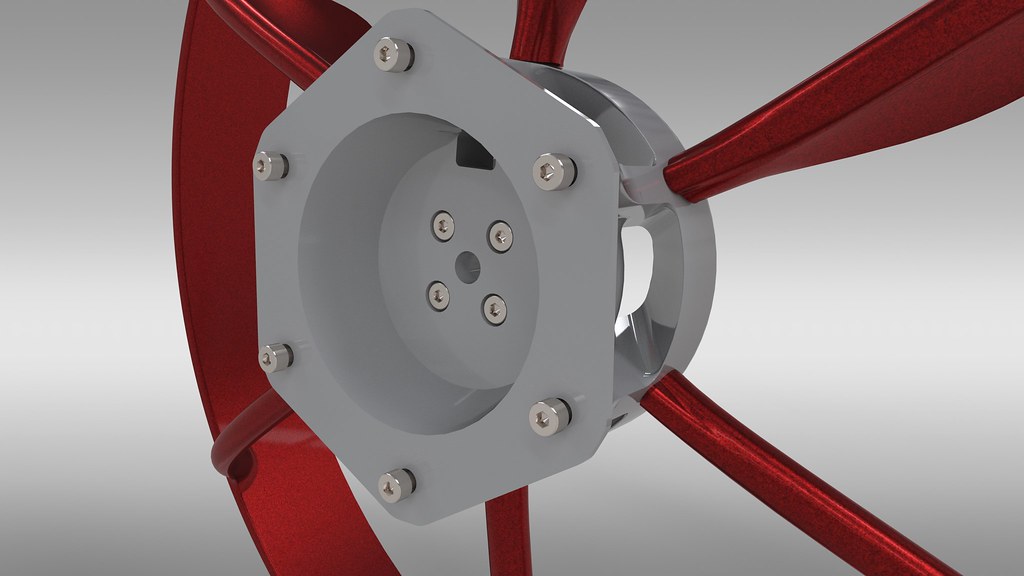
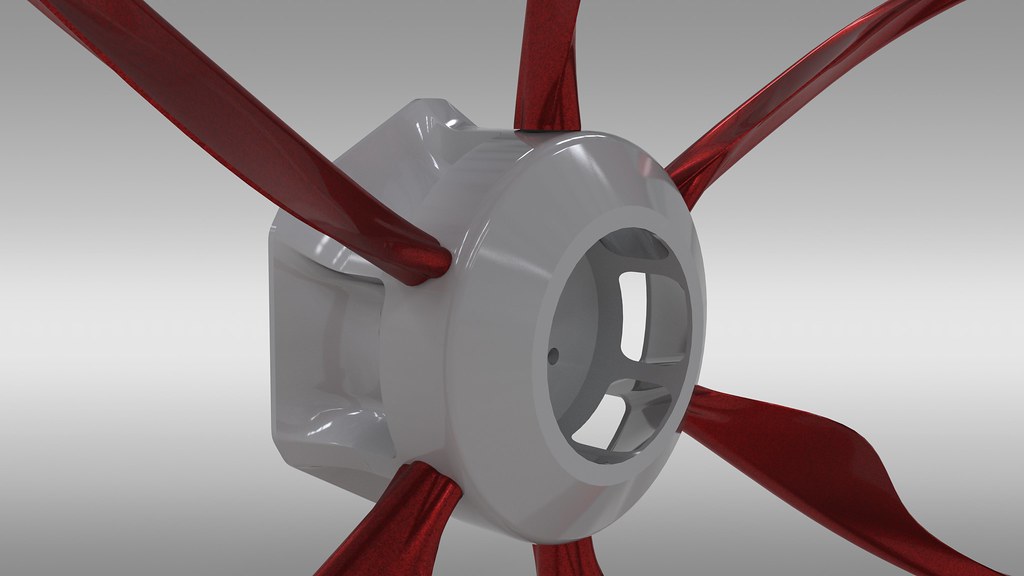
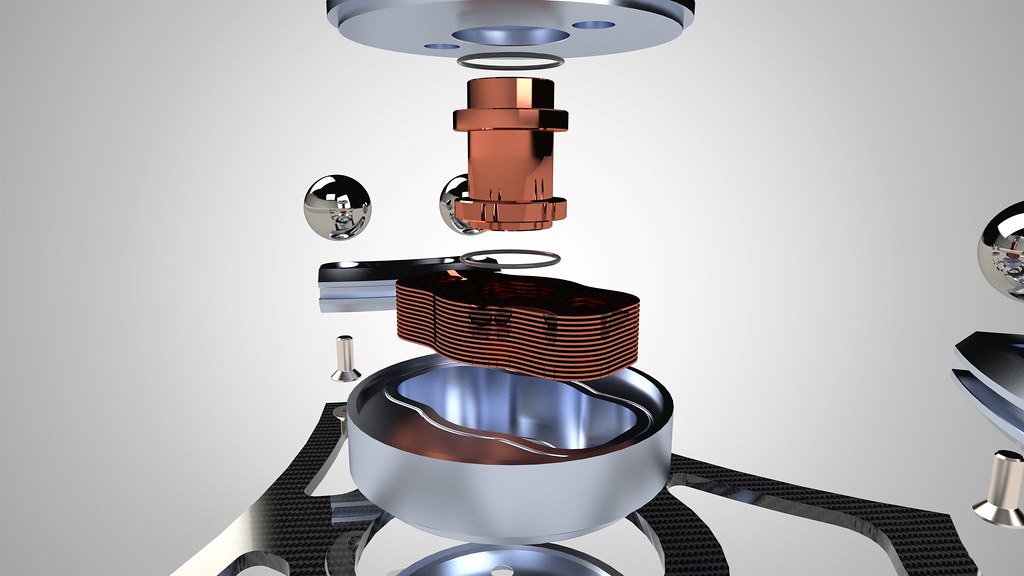
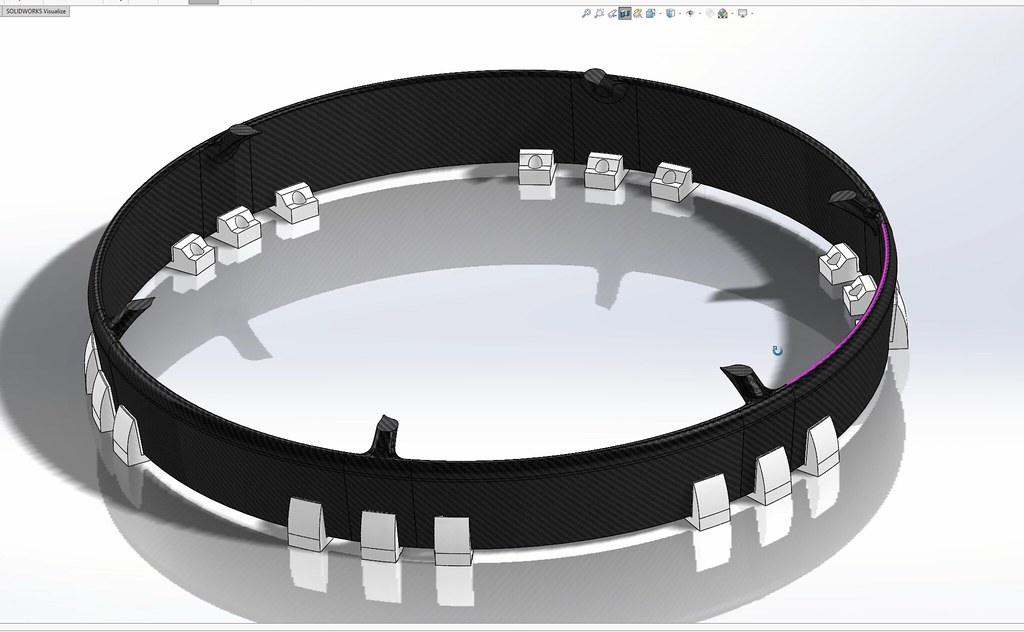
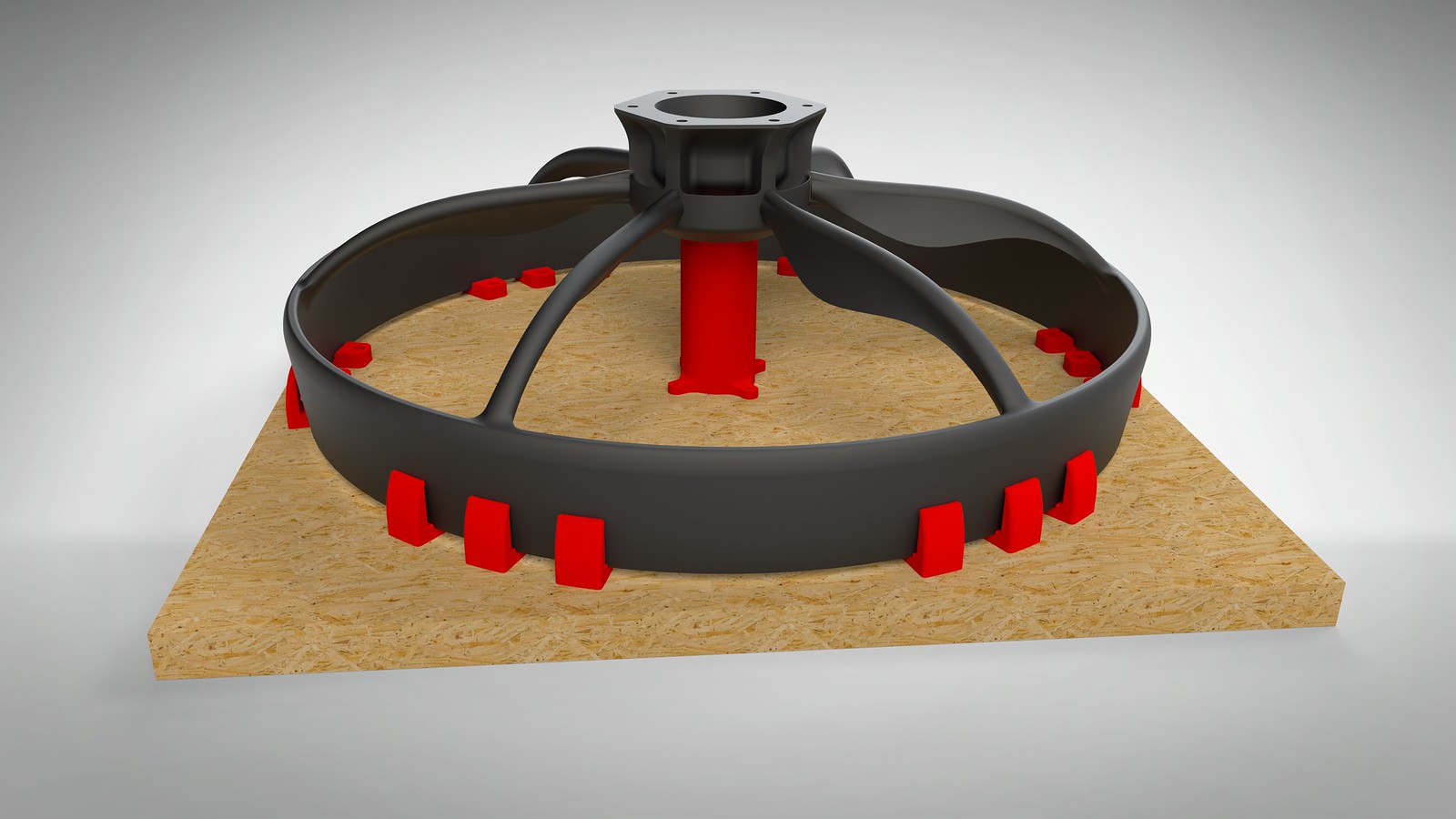
I'm working hard behind the scenes on the design and build of the paramotor but there are definately a couple of things I can share. One of those things is the adapter block that I made just before I left for my ski trip. The idea of this block is that it will make it easier to mount it to the main frame of the paramotor. At first I planned to attach the motormount directly to the mainframe, but later I decided against it because of its complex shape (almost like a snowflake). This adapter converts that to a much more convenient hexagonal shape and bolt pattern. As a bonus it also allows me to improve the airflow to the motor cooling slots.
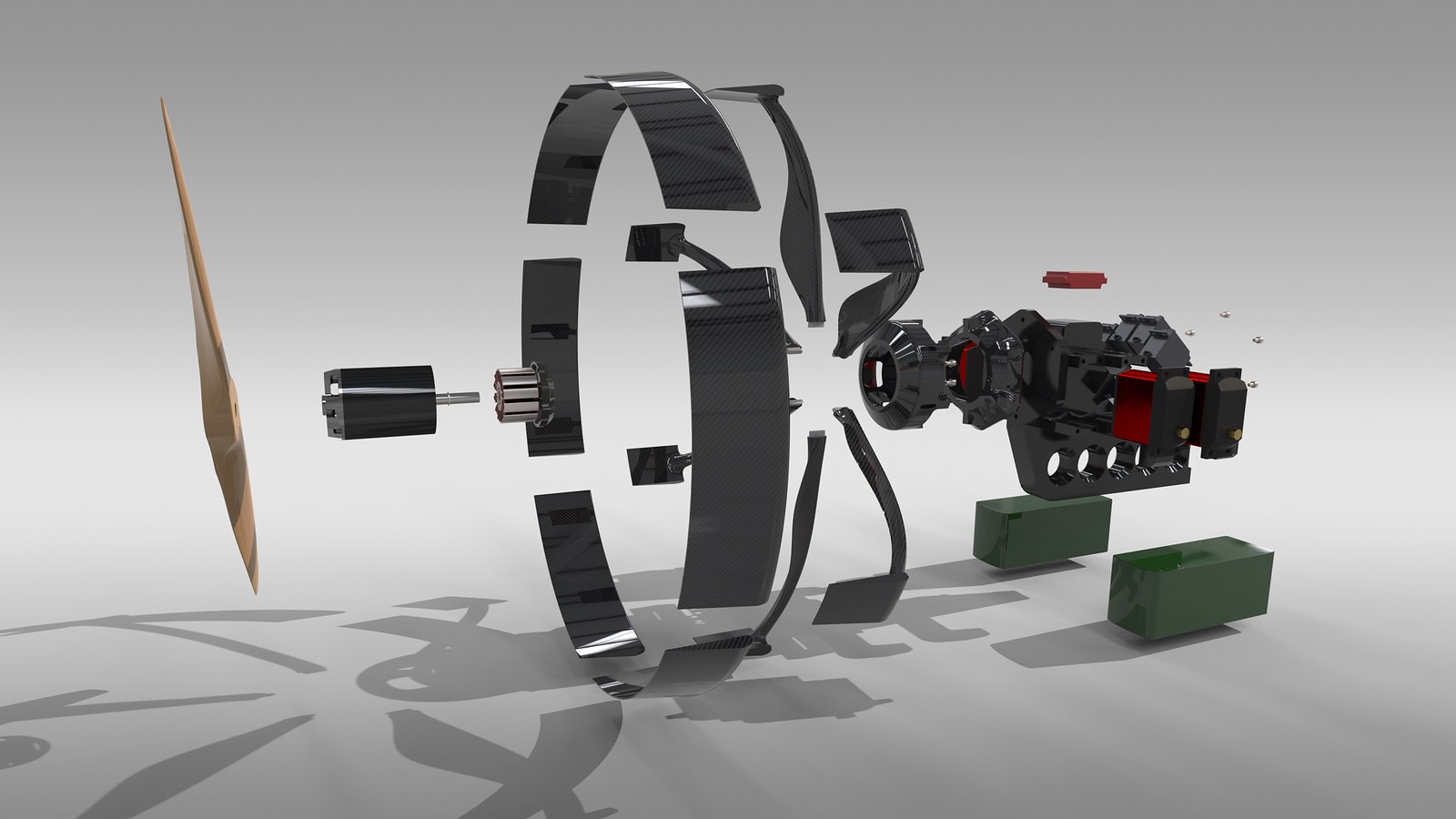
Today I also recieved the final components that I need to get the paramotor to fly (not including the flightcontroller, I will save that for phase 2 when the model flies nicely)
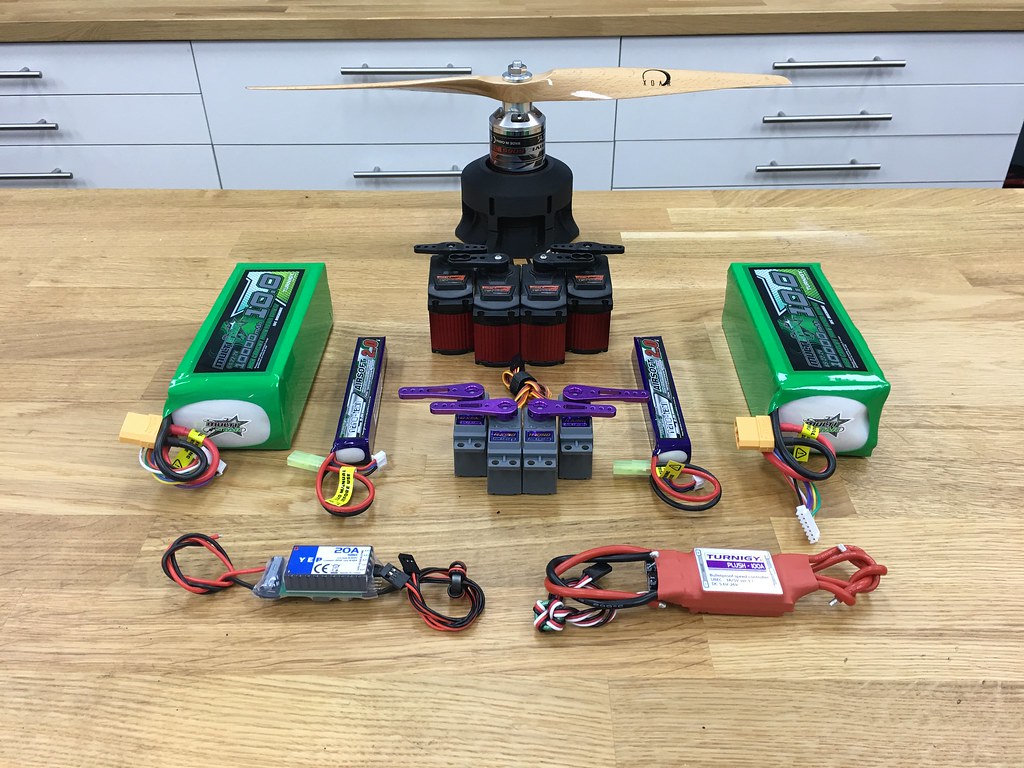
So what do you see here?
2x - 10.000mAh 6S battery (motor)
2x - 2000mAh 2S battery (servo's and other electronics)
4x - HK15138 servo (big-ears and speedbar)
4x - TS-700MG servo (weightshift and brakelines)
1x - 20A SBEC
1x - 100A PLUSH ESC
1x - 5065 320KV aerodrive brushless outrunner
I added the 2S batteries to have the electronics and servo's run seperately from the motor, so even when the main batteries are drained the model will still be controllable.
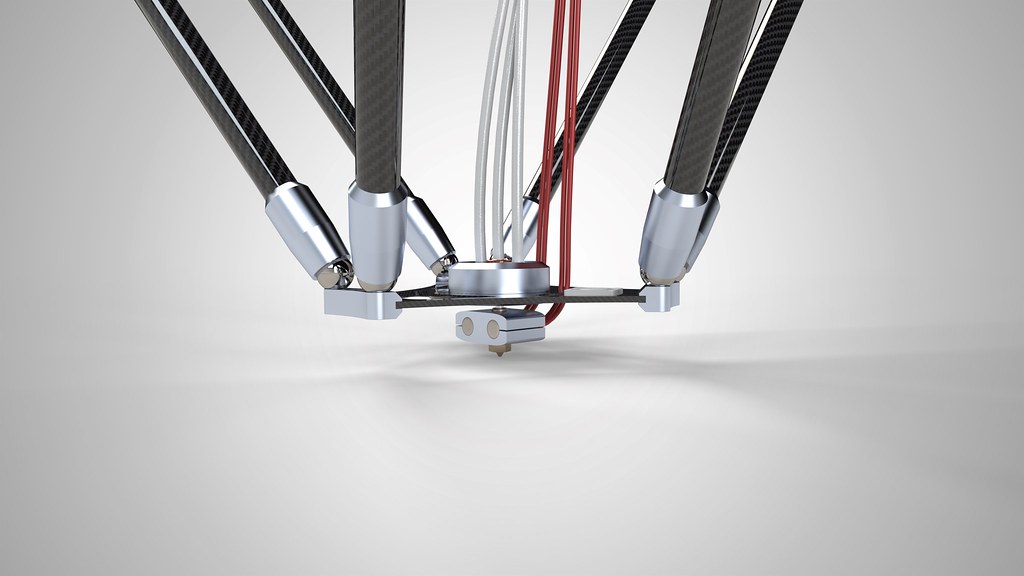
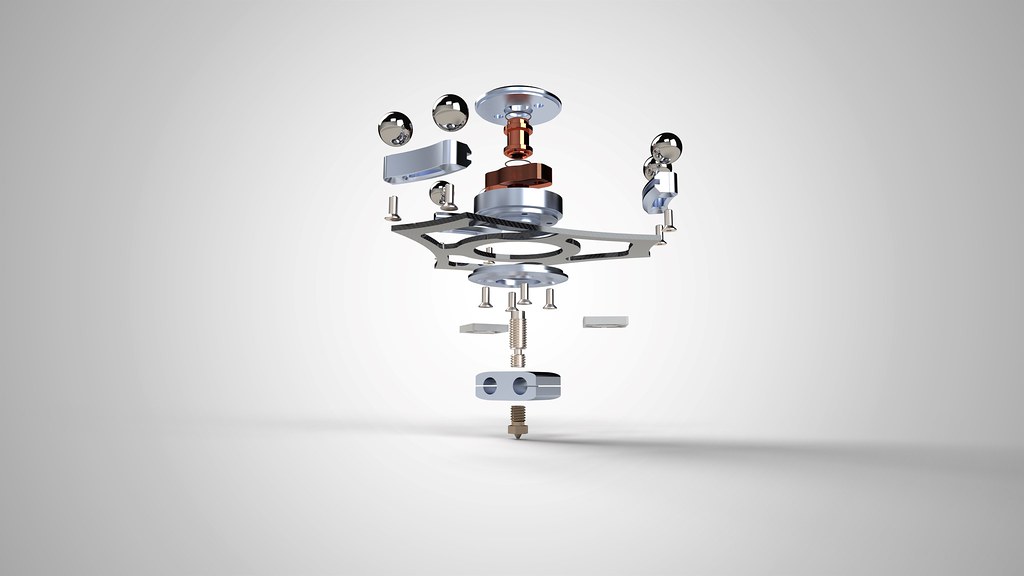
I haven't finished the new video about the paradrone but I did upload another video that might interest you. It is about my goals and other projects (besides the paradrone, for example a large delta 3D printer that I am currently building) I have planned for 2018.
Tomorrow or the day after I expect to finish the video about the 3D printing. I will share it as soon as it is uploaded!
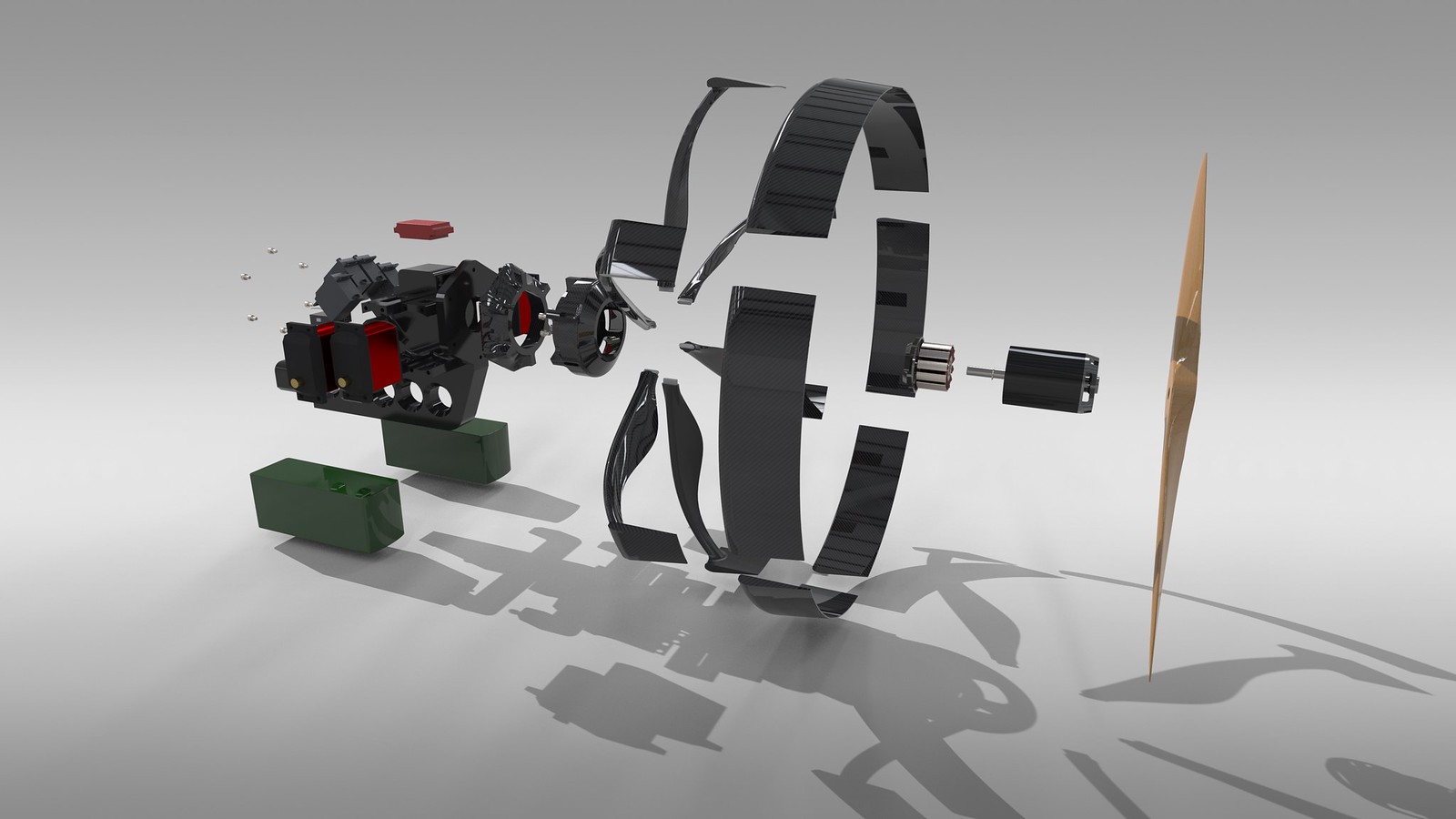
Today I also recieved the final components that I need to get the paramotor to fly (not including the flightcontroller, I will save that for phase 2 when the model flies nicely)
So what do you see here?
2x - 10.000mAh 6S battery (motor)
2x - 2000mAh 2S battery (servo's and other electronics)
4x - HK15138 servo (big-ears and speedbar)
4x - TS-700MG servo (weightshift and brakelines)
1x - 20A SBEC
1x - 100A PLUSH ESC
1x - 5065 320KV aerodrive brushless outrunner
I added the 2S batteries to have the electronics and servo's run seperately from the motor, so even when the main batteries are drained the model will still be controllable.
I haven't finished the new video about the paradrone but I did upload another video that might interest you. It is about my goals and other projects (besides the paradrone, for example a large delta 3D printer that I am currently building) I have planned for 2018.
Tomorrow or the day after I expect to finish the video about the 3D printing. I will share it as soon as it is uploaded!

") I've spend a good half an hour going through this thread and watching your videos. They're great. As the editor of the articles on flitetest.com (the main site for Flite Test), I'm pleased to let you know that we'll be featuring this project this Friday (9th March) as our weekly 'Community Spotlight'. This is a new thing we've started doing as a way to highlight standout builds from our community. There have only been two others so far.
I've spend a good half an hour going through this thread and watching your videos. They're great. As the editor of the articles on flitetest.com (the main site for Flite Test), I'm pleased to let you know that we'll be featuring this project this Friday (9th March) as our weekly 'Community Spotlight'. This is a new thing we've started doing as a way to highlight standout builds from our community. There have only been two others so far.